
ANZINE : CAE 기술 매거진
이전 ANZINE Home Tech-Insight



▶ 68호 : Motor의 전자기력(EM Force)을 고려한 E Axle Transmission의 소음 해석
- 김형국 매니저
- 태성에스엔이
- hkkim@tsne.co.kr
Motor의 전자기력(EM Force)을 고려한 E Axle Transmission의 소음 해석
전기차 시장 확대에 따라 관련 기술을 선행적으로 확보하려는 노력이 활발하게 진행되고 있다. 전기차는 엔진차에 비해 연비 효율이 높다는 장점 외에, 조용하다는 중요한 장점이 있다. 그런데, 이 장점은 오히려 운전자에게 단점으로 작용하게 되었다. 그 이유는 바로 모터와 기어의 접촉 진동으로부터 발생하는 소음이다. 엔진차의 경우, 엔진의 소음이 크기 때문에 이러한 소리가 귀에 잘 들리지 않았지만, 전기차의 경우에는 차내가 너무 조용하다 보니, 모터가 가속하면서 내는 소리가 귀에 매우 거슬리게 되었다. 그래서 EV 감속기의 NVH 분석의 Needs가 증가했고, 실험 뿐 만 아니라 해석으로도 진동 소음을 분석하려는 시도가 늘어나고 있다.
이번 호에서는 모터와 기어시스템이 유발하는 소음 문제에 접근하는 방법을 소개한다. 그 과정에서 소음 분석 프로세스에서 전자기장, 다물체동역학, 음향 해석을 모두 다루게 되는데, 전자기장은 Maxwell, 다물체동역학은 Ansys Motion, 음향은 Harmonic Acoustics가 각각 담당하며, 앞서 언급한 순서대로 해석이 진행된다. 각 프로그램에 대한 기본 설명은 생략하였으므로, 기본 내용은 태성에스엔이 홈페이지 혹은, eTSNE 홈페이지를 참고하기 바란다.
서론
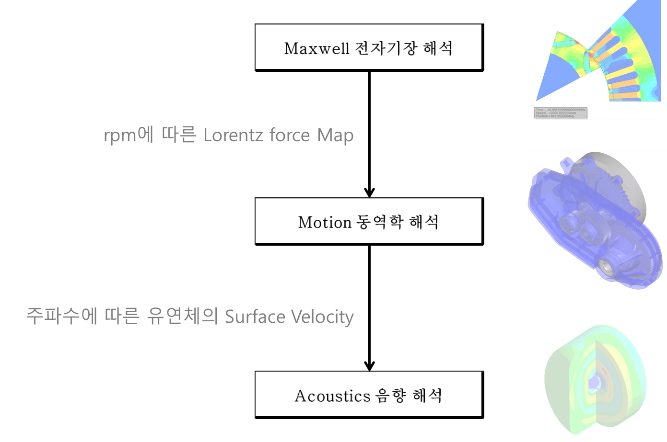
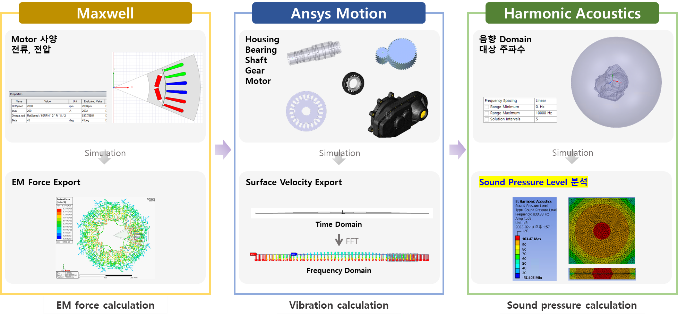
[그림 1] 소음 해석의 Process
해석 프로세스를 도시적으로 표현하면 [그림 1]로 나타낼 수 있다. 첫 번째 해석은 Maxwell을 이용한 Motor의 부하 해석이다. Motor의 형상, 재질 특성이 반영된 2D 모델에 Rotor의 회전 속도(rpm) 조건을 입력하여 Stator와 Rotor의 표면에 발생하는 Lorentz Force를 계산한다. 회전 속도는 예를 들어, 500~10,000rpm을 500rpm 간격으로 Parameter Study 해석을 한다. 해석을 한 후, 속도에 따른 EM Force 데이터를 추출하면, 이 다음 단계인 Ansys Motion의 동역학 해석에서 Rotor의 회전 속도에 따른 EM Force로 사용된다. [그림 1]의 두 번째 단계인 Ansys Motion 동역학 해석에서는 모터의 진동과 기어의 Whine, Rattle, 그리고 샤프트의 변형과 베어링의 비선형 강성, 마지막으로 하우징의 고유 진동수가 반영된 진동 결과를 얻을 수 있다. 진동 결과는 하우징 표면의 속도로 나타낼 수 있는데, 이 속도 데이터는 다음 단계인 Harmonics Acoustics의 음향 해석의 Input Source로 사용된다. Harmonic Acoustics는 Frequency Domain의 선형 해석인 반면, Ansys Motion은 Time Domain에서 진행되는 Transient Dynamics 해석이기 때문에 시간에 따른 하우징 표면 속도를 Frequency Domain으로 변경하여 저장해야 한다. 이번 주제에서 다루는 E Axle Transmission의 NVH 분석에서 가장 큰 부분을 차지하는 단계가 이 동역학 해석 단계이다. 해석 모델링 소요 시간과 솔버의 해석 소요 시간이 오래 걸리는 것뿐만 아니라 진동 소음 결과에 가장 큰 영향을 주는 요소가 반영되기 때문이다. NVH 주요 요소를 나열하자면 다음과 같다. Maxwell에서 추출한 EM Force에 의한 Motor의 진동, Shaft의 Bending, Gear의 치 형상과 강성에 따른 전달 오차, Bearing의 비선형 강성, Housing의 고유 진동 특성이다. 동역학 해석은 Drivetrain Toolkit을 사용해 이러한 특성을 반영하면서 빠르게 해석을 수행할 수 있다. Mechanical 환경이 익숙한 기존의 구조 해석 엔지니어들도 동일한 환경에서 Ansys Motion Drivetrain Toolkit을 사용할 수 있기 때문에, 튜토리얼을 몇 번 따라해보면 EV 감속기 모델 해석을 쉽게 할 수 있다. [그림 1]의 마지막 세 번째 단계는 Harmonic Acoustics를 이용한 음향 해석이다. EV 감속기 주위의 공기 매질의 Mesh를 작성하고 속도 Source로부터 발생하는 음파의 거동을 계산하며, 그 결과로 하우징 주위의 dB을 분석할 수 있다. 음향 해석을 한 후, Inverse FFT 기능을 이용하면 특정 위치의 주파수별 dB을 .wav 확장자 파일로 Export하고 소리를 들어볼 수 있다.
E Axle Transmission의 소음원
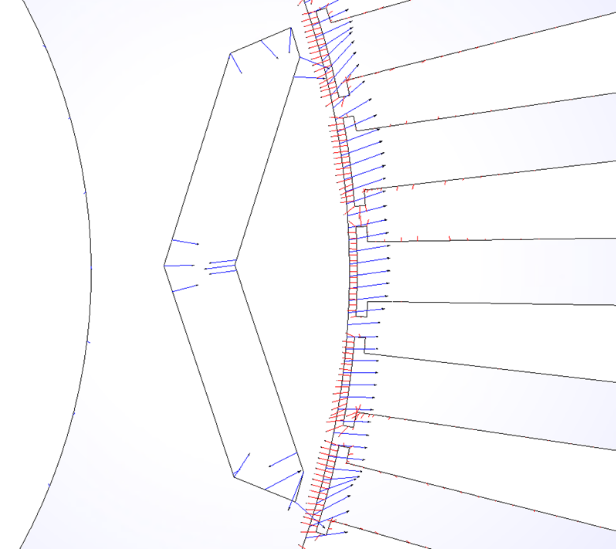
개요에서 설명한 소음 유발 요인 중, 일반적으로 알려진 모터의 진동 원인은 코깅 토크이다. 코깅 토크란 철 자석의 인력 때문에 발생하는 토크이며, 공극의 형상에 따라 다른 패턴이 나타난다. 이 코깅 토크는 전류의 인가와 상관없이 항상 존재하며, 자석의 특성 상 제거할 수 없는 진동 요소이다. Rotor의 위치 변화에 따라 자석의 상대 거리가 달라지면서 인력의 크기가 증감하고, 토크의 크기도 요동하는데, 이 현상을 토크 리플이라고 한다. 위치에 따라 받는 힘이 달라지는 현상은 [그림 2]에 나타내었다. 그러므로 이 코깅 토크를 최소화하기 위해 Stator와 Rotor의 형상 최적화가 모터 설계 단계에서 이루어진다.
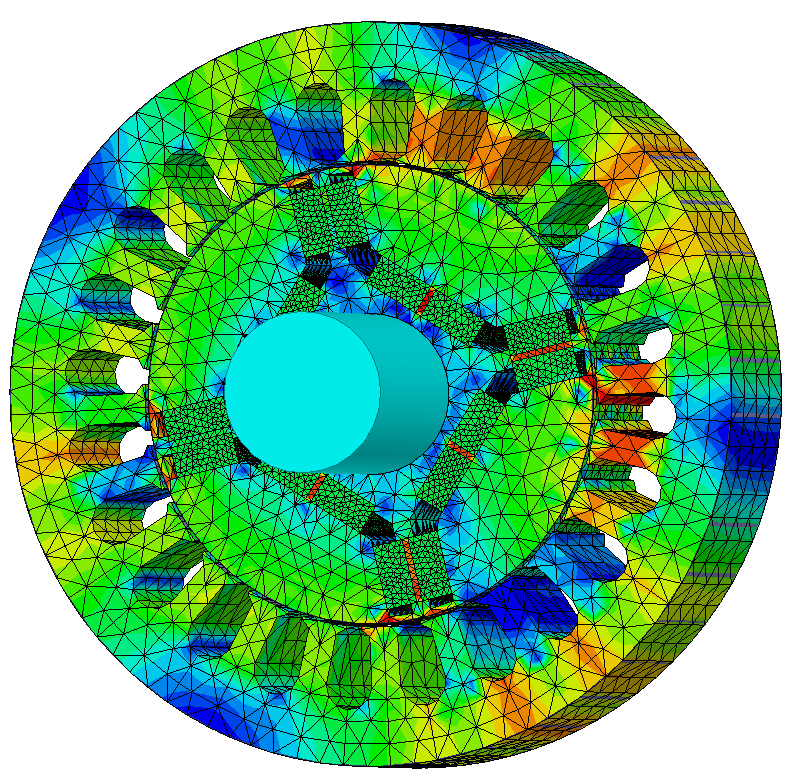
[그림 2] 모터 전자기력의 분포
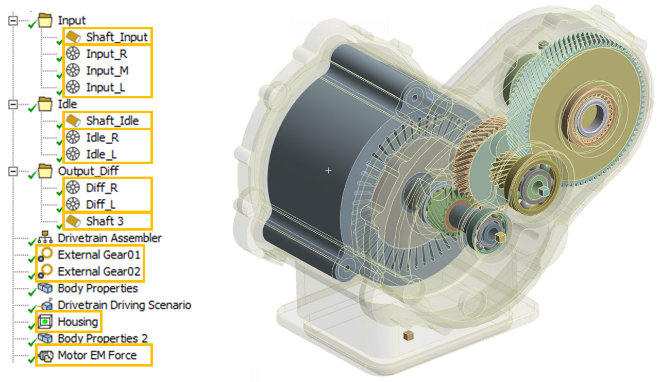
또 다른 EV감속기의 주요 소음 유발 요인은 기어 시스템이다. 치면이 닿았다가 떨어지는 메커니즘과, 접촉 이빨 개수와 기어 이빨의 변형에 의한 전달 오차는 필연적이다. 그러므로 치면의 형상을 최적화하고 이뿌리의 강성을 증가하여 전달 오차를 줄이는 것이 중요하다. [그림 3]에 기어 뿐 만 아니라, 모터와 하우징의 진동이 모두 결합된 시스템의 진동 유발 요소가 나타내었다.
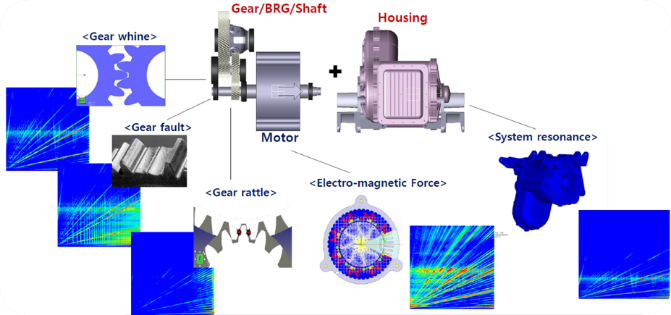
[그림 3] EV감속기 해석 모델의 구성
기어 시스템에 존재하는 또 다른 진동 요소는 샤프트와 베어링이다. 샤프트와 베어링을 하우징에 조립할 때에 발생하는 Imbalance와 Misalignment는 작동 시간과 비례하여 점점 더 큰 문제를 일으키며, 베어링의 Roller나 Ball이 Raceway에 접촉하는 개수에 따라 달라지는 강성의 변화도 진동을 유발하는 원인이 된다.
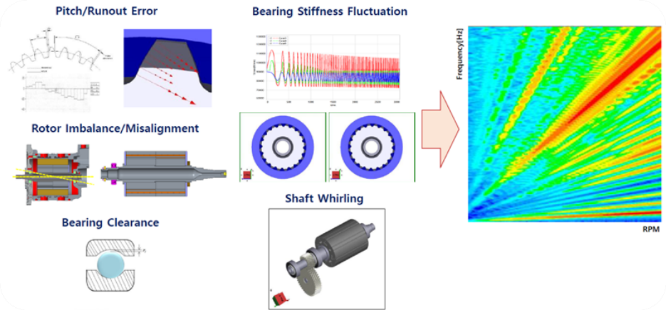
[그림 4] 기어시스템의 진동 원인
소음 해석 Workflow
전체 해석 프로세스를 [그림 5]에 요약 정리하였으므로, 거시적인 절차에 대한 이해를 하고 나서 뒤의 내용을 상세히 읽어보기 바란다. 다음 단락에서부터 각 해석 단계에 대한 상세한 내용이 나온다. Maxwell ? Ansys Motion ? Harmonic Acoustics 이 세 프로그램을 연속으로 해석해야 하기 때문에 절차가 복잡하고 시간도 오래 걸린다. 하지만, 그 만큼 각 Physics 해석에서 진동에 관련된 모든 요소의 특성을 반영할 수 있기 때문에, 대략적으로 등가화 하는 다른 해석 방법에 비해 높은 정확도를 기대할 수 있다.
[그림 5] Software별 주요 인자
Maxwell을 이용한 Motor 해석
본 주제에서 Maxwell에서 얻어야 하는 결과는 rpm에 따른 Node의 EM Force이다. [그림 6]과 같이 rpm 파라미터 스터디 조건을 설정하고, [그림 7]과 같이 Export하고자 하는 대상을 설정한다. 세팅 후, 해석을 하면 Transient해석 결과를 내보낼 수 있다.
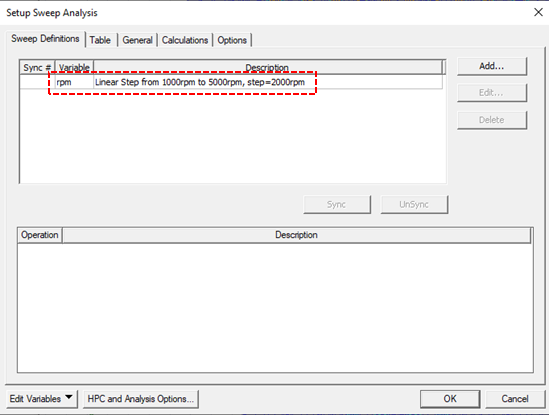
[그림 6] Maxwell의 RPM Parameter Study
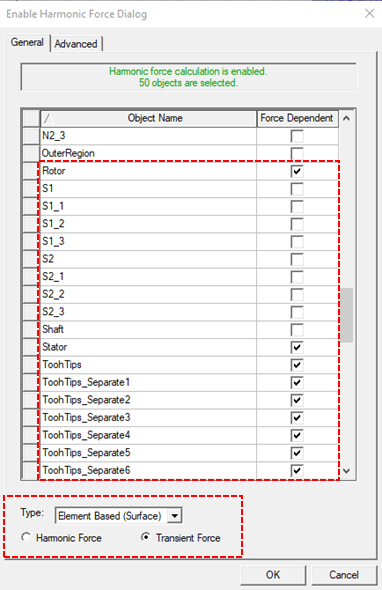
[그림 7] Maxwell에서 Export할 대상 정의
저장되는 파일의 확장자는 unv, anf, amesh이며 모두 Ansys Motion의 동역학 해석에 사용된다. unv파일에는 파라미터 스터디 rpm 조건이 저장되고, anf파일에는 rpm별로 Node에 작용하는 Force가 저장된다. 마지막으로 amesh파일에는 Rotor와 Stator의 Node위치에 대한 정보가 저장된다. [그림 8]은 anf파일이다. rpm 수에 따라, Node의 개수에 따라, 저장한 Time step에 따라 데이터의 양이 늘어나고 줄어든다.
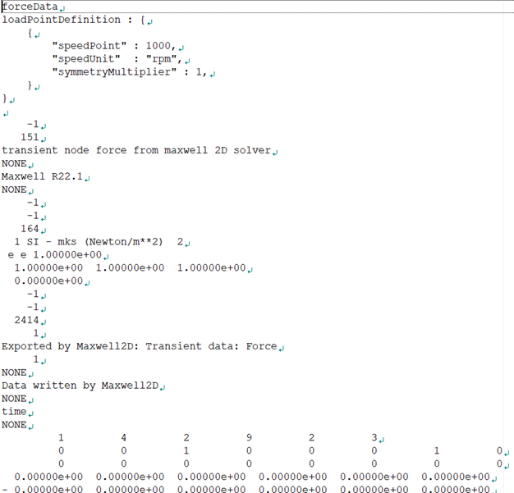
[그림 8] Rotor의 각도, 각속도와 전자기력
이 세개의 파일에 저장된 데이터를 도식화하면 [그림 9]와 같다. 이러한 EM Force Map이 Maxwell에서 Export대상으로 설정한 Rotor와 Stator의 모든 표면 Node에 대해 만들어진다.
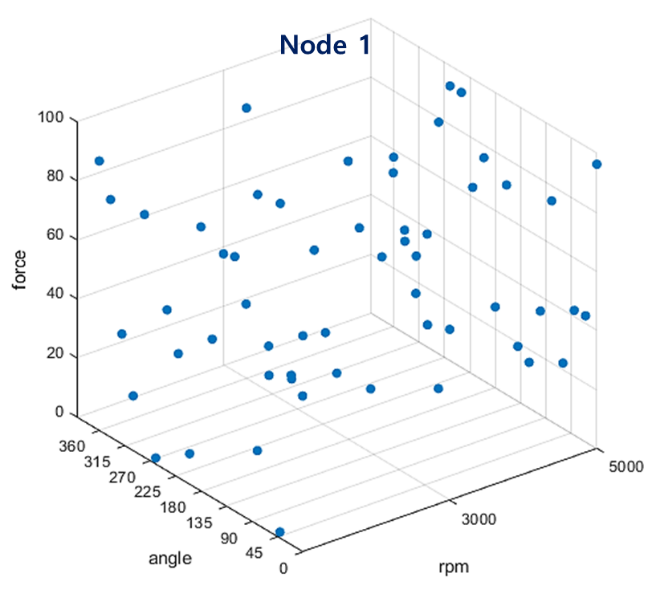
[그림 9] Maxwell에서 Export한 전자기력 Map(실제 값이 아닌, 이해를 돕기 위한 이미지)
이 맵을 Ansys Motion에 적용하고 동역학 해석을 하면, Rotor의 회전 속도와 각도에 따라 모든 위치에 EM Force가 작용한다. 작용된 EM Force는 Motion Post에서 확인이 가능하며, [그림 10]과 같다.
[그림 10] Ansys Motion에 반영된 전자기력
Ansys Motion을 이용한 시스템 동역학 해석
EV 감속기 전체 시스템 해석을 하는 가장 중요한 단계이다. [그림 11]과 같이 주요 요소들이 상호 구속하며 조립되어 있다. Shaft는 Beam이나 FE Mesh 타입으로 만들 수 있다. Bearing과 Gear는 재원을 입력하면 자동으로 생성되므로, CAD Geometry가 필요하지 않다. Housing과 Motor는 FE Mesh 타입으로 만들어서 진동을 반영할 수 있도록 해야 한다. 이 때, Motor의 진동은 10,000rpm 이상의 High Frequency 대역이므로, 이 진동을 반영하기 위해서는 Material Damping을 반드시 줄여야 한다. Stiffness Proportional Damping의 크기는 1e-07 정도가 적당하다. 추가로, analysis Setting에서 Numerical Damping의 크기와 Time Step Size의 크기도 줄여야 진동의 파형을 제대로 표현할 수 있다.
[그림 11] Workbench환경의 Drivetrain
Maxwell에서 Export한 unv, anf, amesh파일을 Motor에 적용하는 GUI는 [그림 12]와 같다.
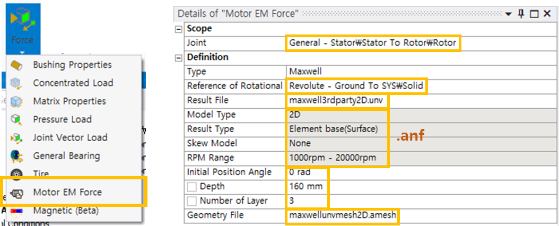
[그림 12] EM Force Entity
여기서 주의할 점은 Joint와 Reference of Rotational이다. EM Force를 만들기 전에 앞서, General Joint와 Revolute Joint를 각각 만들어 놓아야 하다. General Joint는 Reference로 Stator를, Mobile로 Rotor를 선택해야 하며 선택하는 면은 중요하지 않다. General Joint의 Z 축은 반드시 2D Motor형상이 Extrude되는 방향, 즉 회전 축 방향이어야 한다. Revolute Joint는 Rotor와 동일한 속도로 회전해야 한다. 일반적으로 Rotor를 회전시키는 Revolute Joint를 EM Force의 Reference of Rotational로 선택한다. 여기서 EM Force의 개념을 설명하자면, Rotor를 돌리는 힘은 Ansys Motion의 Revolute Joint에서 발생하는 것이지, EM Force 자체로 Rotor를 회전시키는 것이 아니다. 다시 말해, Rotor의 회전수와 위치에 따른 모터의 진동만 발생시키는 것이다. 그러면 Rotor와 연결된 Shaft와 Stator와 연결된 Housing에 각각 진동이 전달된다. 추가로, Initial Position Angle과 Depth, Number of Layer를 정의하고, 관련 파일을 모두 불러오면 EM Force 적용이 완료된다.
Time Domain의 해석 결과를 Frequency Domain의 결과로 바꾸기 위한 조건을 [그림 13]과 같이 Analysis Setting에 정의한다.
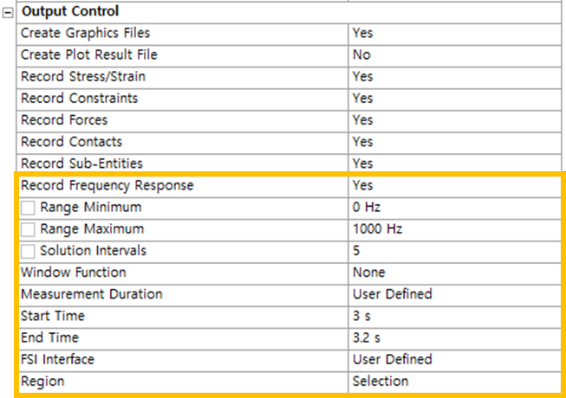
[그림 13] Ansys Motion에서 저장할 주파수와 유연체의 면 정의
여기에서는 저장할 유연체의 면을 선정해야 한다. Housing의 표면을 Named Selection으로 만들고 그것을 FSI Interface Region으로 선택하면 된다. 추가로, FFT 후처리를 하기 위한 시간 구간을 설정해야 하며, Harmonic Acoustics에 넘겨주기 위해 저장할 주파수를 설정해야 한다. 소음 분석을 할 때에는 관심 주파수가 정해져 있기 때문에, 해당하는 대역으로 설정하면 된다.
Ansys Motion 해석을 하면 [그림 14], [그림 15], [그림 16]과 같은 결과를 확인할 수 있다.
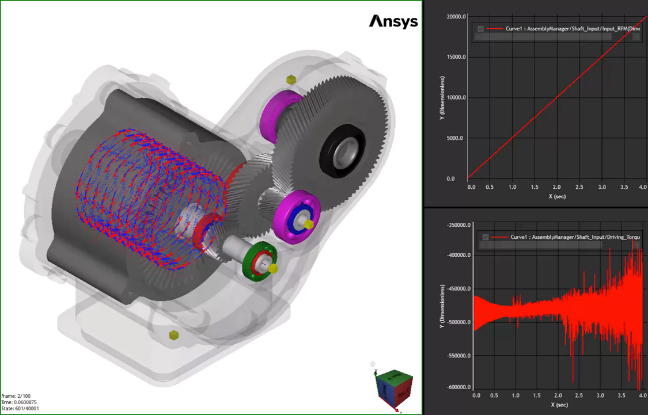
[그림 14] Time Domain의 진동 결과
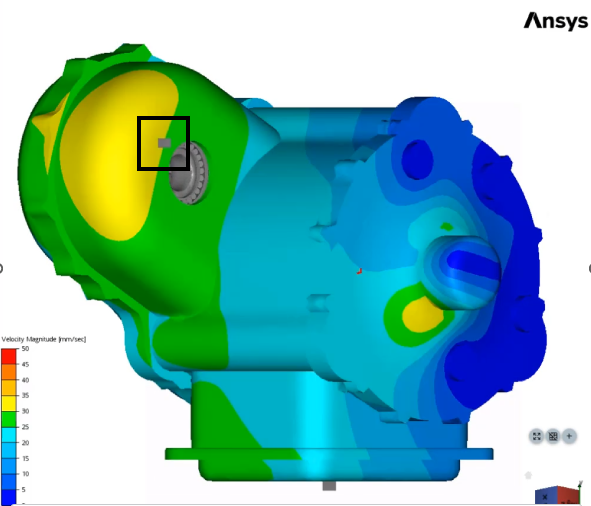
[그림 15] Housing 표면의 속도 분포
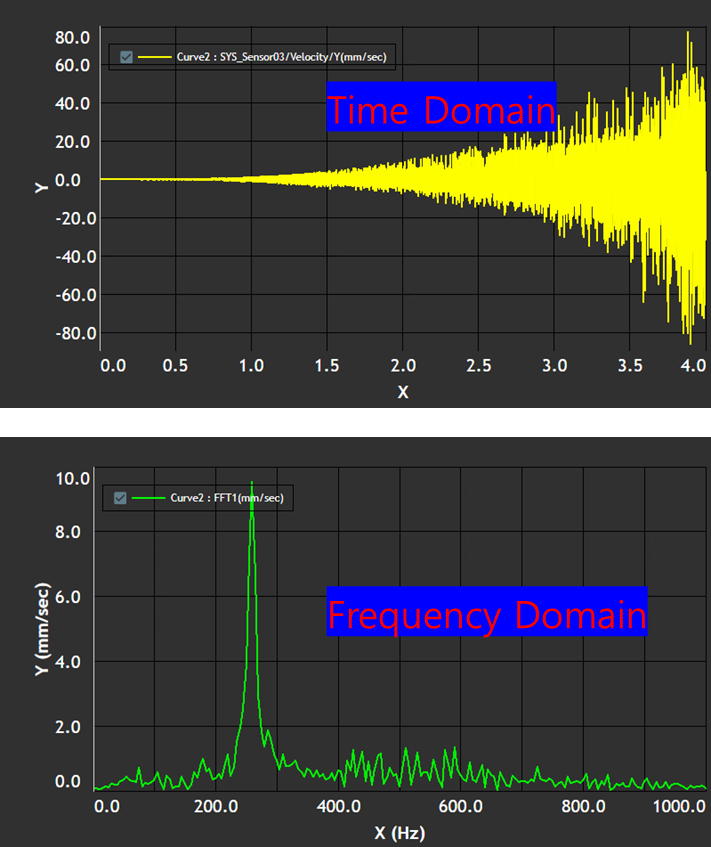
[그림 16] FFT 변환을 통한 주파수 분석
[그림 14]에서는 Motor의 rpm과 토크를, [그림 15]에서는 Housing의 가속도 Contour를, [그림 16]에서는 Housing의 특정 위치에서의 가속도 진동 결과를 볼 수 있다. 이 다음 단계인 음향 해석까지 진행하지 않고, 이 진동 결과만으로 NVH분석을 완료하는 경우가 아직까지는 더 많았다. 하지만, 앞으로는 이 진동 소스를 이용해, 음향 해석을 하는 Needs가 점점 생길 것으로 예상된다.
Harmonic Acoustics를 이용한 음향 해석
Ansys Motion에서 저장된 주파수별 Housing 표면 Mesh의 속도 데이터를 불러오면 [그림 17]처럼 모든 위치에서의 속도 패턴을 확인할 수 있으며, 이 속도가 음압의 변화를 유발하는 소스가 된다.
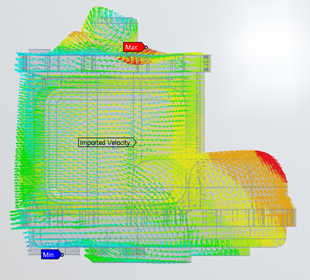
[그림 17] Harmonic Acoustics의 Input Velocity
공기의 Mesh를 만들고, 음향 해석을 하면 [그림 18]과 [그림 19]와 같은 결과를 볼 수 있다.
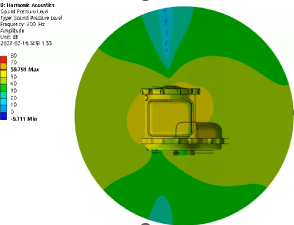
[그림 18] 음향 해석에서 얻은 음압 결과
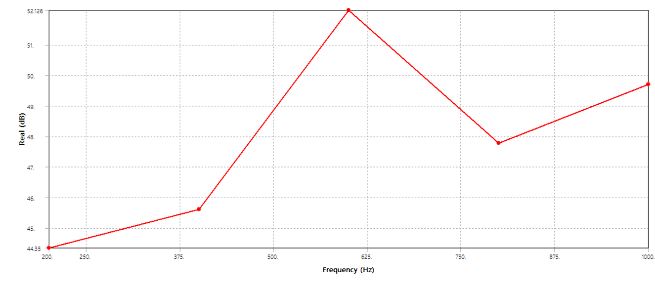
[그림 19] 주파수 별 dB
많은 주파수를 계산할수록 Inverse FFT기능으로 wav파일을 만들 때 더 정확한 소리를 들을 수 있다.
맺음말
자동차 시장이 확대됨에 따라, 관련 기술력 선행 개발이 필요하다. 지금까지 전기차의 주요 기술 중에서 NVH 분석 방법에 대한 내용을 살펴보았다. 복잡한 해석 프로세스를 거치는 긴 과정이지만, 소음에 영향을 주는 요소를 최대한 반영한 해석이므로, 그 신뢰도는 높다. 실험이 아니라 해석만으로 실제와 유사한 소리를 만들어낼 수 있다는 의의가 크기 때문에 기존의 Maxwell, Ansys Motion, Harmonic Acoustics를 사용하는 엔지니어라면 한 번 도전해 볼만한 과제이다. 또한, Motor의 형상을 변경하거나 Gear 치면의 Micro Geometry를 수정하여 소음, 진동 결과를 면밀히 분석하면 설계 개선에 직접적이고 유용한 데이터를 확보할 수 있다.



 ㈜태성에스엔이
㈜태성에스엔이-
- 대표이사 : 심진욱, 박인규
- 사업자등록번호 : 219-81-23192
- 통신판매업 신고번호 : 제2017-서울성동-1100호
ⓒ TAE SUNG S&E Inc.



