
ANZINE : CAE 기술 매거진
이전 ANZINE Home Tech-Insight



Ansys Aqwa를 이용한 LNG 운반선의 Hydrodynamic 해석
- 황정필 수석매니저
- 태성에스엔이
- jphwang@tsne.co.kr
Ansys Aqwa를 이용한 LNG 운반선의 Hydrodynamic 해석
Ansys Aqwa™를 이용하여 해상 환경 조건을 고려한 LNG 운반선의 hydrodynamic 해석 진행 방법에 대해 Moss type LNG 운반선 모델을 이용하여 알아보고자 한다.
Introduction
국제해사기구(IMO, International Maritime Organization)는 2050년 탄소중립 달성을 목표로 국제해운의 온실가스 배출을 규제하고 있으며, 이를 위해 선박에서 배출되는 대기 오염 물질 및 온실 가스 감축 목표를 단계적으로 설정하고 있다. 주요 목표로는 2008년 대비 연간 국제 해운 온실가스 배출량을 2030년까지 최소 20%, 2040년까지 최소 70% 감축하는 것이 포함된다. 이에 따라 전 세계 해운 선사들은 2050년까지 탄소중립을 달성해야 하며, 이를 위해 무탄소 선박 연료로의 전환이 필수적인 과제가 되고 있다. 해운업계는 이러한 강화된 IMO 개정 목표에 대응하기 위해 기존 석유 기반의 연료를 대체할 수 있는 과도기 연료로 액화천연가스(LNG, Liquefied Natural Gas)를 채택하고 있으며, 현재 LNG는 친환경 선박연료로 분류되어 전 세계 해운업계에서 관련 기술과 설비 개발에 많은 투자를 하고 있다.
LNG 운반선은 이러한 전세계적인 해운 업계의 변화 속에서 핵심적인 역할을 수행하고 있다. LNG가 IMO의 규제 대응을 위한 친환경 선박 연료로 자리잡으면서, 안정적이고 효율적인 공급망 구축 및 연료 운송이 필수적이며, 이를 위해 LNG 운반선의 수요가 지속적으로 증가하고 있다.
■ LNG 운반선
LNG(Liquefied natural Gas) 운반선은 액화천연가스를 운반하는 특수 선박으로, 극저온(-162°c) 상태의 가스를 저장하고 운반하는 것이 특징이다.
.jpg")
그림 1 LNG 운반선
LNG 운반선의 구조는 크게 선체(Hull), 화물창 (Cargo Tank), 단열 시스템(Insulation System), 재기화 시스템 (Regasification System), 추진 시스템 (Propulsion System), 연료 저장 및 공급 시스템(Fuel Gas Supply System), 화물 처리 시스템(Cargo Handling System), 안전시스템과 네비게이션 및 자동화 시스템으로 구성되어 있다.
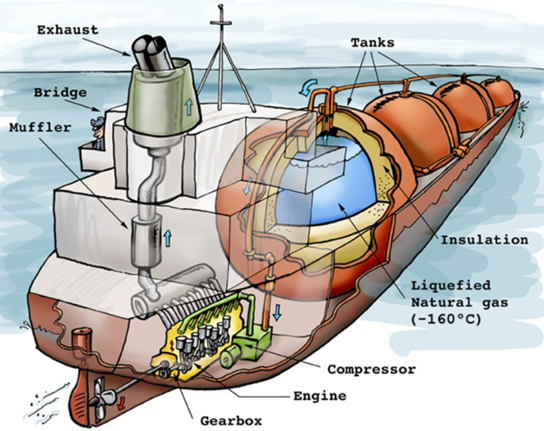
그림 2 LNG 운반선 구조
출처 : Wikipedia, https://ko.wikipedia.org/wiki/LNG%EC%84%A0
LNG 운반선의 주된 선종은 moss type과 membrane type으로 분류된다. Moss type은 탱크가 선체로부터 독립되어 있고 스커트 구조에 의해 선체에 지지되는 방식이며, 탱크 내부에 LNG를 싣기 위한 압력과 LNG 중량을 견디고 탱크 내부 열침입을 최소화하기 위해 구형으로 설계되었다.

그림 3 LNG 운반선의 종류
입열이 작기 때문에 LNG 증발 가스(BOG)가 적으며, 열 응력 집중을 완화할 수 있고, sloshing 충격이 작고 충돌, 좌초 등의 사고 발생 시 membrane type 대비 안정성이 좋은 장점이 있으나 구형이므로 선창의 공간 이용 효율이 떨어지고 상갑판상의 돌출부에 의해 선체 전방에 사각 지대가 존재하고 풍하 면적이 넓어 운항성능이 떨어지는 단점이 있다. 반면 membrane type은 탱크의 외벽인 방열재가 선창 내벽과 밀착되어 있어 탱크 내부의 LNG 압력과 중량이 선체에 전달되는 구조이다. 선창 공간을 낭비 없이 사용할 수 있고 상갑판의 돌출이 작으므로 풍하 면적이 작아 선박 운항성능이 좋으나 LNG 운반선의 횡요 주기가 화물창 내부의 LNG 유동과 공진하게 되면 매우 큰 sloshing 하중이 가해져 화물창 손상이 발생하는 단점이 있다. 현재 더 많은 화물을 싣기 위한 대형화가 membrane type이 상대적으로 저렴하고 용이하므로 주로 제작 및 사용되고 있다.
LNG 운반 선박은 일반적으로 대형화되는 추세이며, 경제성과 환경적 이점을 고려하여 최신 기술들이 적용되고 있다. 이러한 선박들은 극저온 상태의 LNG를 안전하게 저장 및 운송할 수 있도록 고급 단열 기술 및 구조 안정성, 운항 안정성 확보를 위한 설계가 필요하다.
■ LNG 운반선의 Hydrodynamic 해석
LNG 운반선은 대량의 LNG를 안전하게 운송하기 위해 특수 설계된 선박으로 해양 환경에서의 동적 거동을 정밀하게 분석하는 것이 중요하다. 선박이 해상에서 파랑, 바람, 해류 등의 외부 환경 하중을 받을 때 발생하는 운동 응답을 예측하고, 선박의 안정성을 확보하는 것이 필수적이다. 특히 LNG 선박은 내부에 액체 화물이 존재하기 때문에 내부 유체의 운동이 선박의 전체적인 운동 특성에 큰 영향을 미친다. 따라서, 정확한 해석을 하기 위해 선박 내부 탱크 내 유체의 sloshing 거동을 반영할 수 있는 모델링 기법이 요구된다.
현재 해양 구조물 및 선박의 유체와 구조 상호 작용을 고려한 해석에 다양한 수치해석 기법들이 적용되고 있으며, 그 중 Ansys Aqwa는 해양 및 조선 공학 분야에서 널리 사용되고 있는 강력한 해석 툴들 중 하나이다. 이번 호에서는 Ansys Aqwa를 이용한 LNG 운반선의 해석을 통하여 진행 방법에 대해 알아보도록 하겠다.
■ Internal Tank
2019R1 버전부터 추가된 ‘Internal Tank’ 기능을 이용하여 선박이나 해양 구조물 내부의 저장 탱크 내 유체의 sloshing 효과를 반영하여 정확한 동적 거동 해석을 수행할 수 있다.
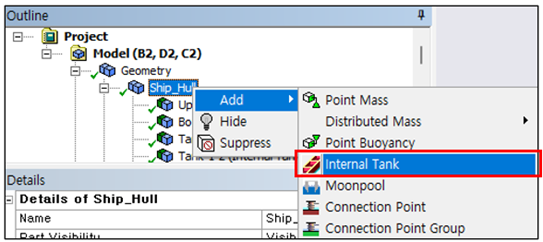
그림 4 Internal Tank
■ 1) Local Internal Tank Axes and Combined CoG
탱크 내 유체의 정수압 및 유체 역학적 특성을 효율적으로 표현하기 위해 내부 탱크의 국부 축 좌표계(Local Internal Tank Axes, LTA)를 사용하여 이를 정의한 후 전역 좌표계(Fixed Reference Axe, FRA)로 변환하는 방식이 일반적이다. 이 축 좌표계 값은 구조물의 질량 중심과 내부 탱크의 유체의 결합된 중심을 기준으로 하며, 유체가 고려된 여러 개의 내부 탱크가 적용될 경우에도 내부 탱크 내 각각의 축 좌표계를 고려하여 각각의 모든 탱크 거동들을 고려할 수 있다. 아래의 그림 5는 유체 고려 내부 탱크의 국부 축 좌표계와 각 기본적인 6자유도 거동을 나타내고 있다.

그림 5 Local Internal Tank Axes and Basic Motions
내부 탱크의 유체 평면 중심(부유 중심)에 LTA 원점이 있고, x,y,z, 축은 각각 전역 좌표계 기준 축(FRA)의 x,y,z 축과 평행하며, LTA의 내부 탱크의 Surge, Sway, Heave의 병진자유도와 Roll, Pitch, Yaw의 회전 자유도를 가지고 있다.
내부 탱크 내에는 실제로 Stiffener 및 Frame 구조물들과 그 외 설비 등이 포함되며, 이는 내부 유체가 차지하는 전체 부피를 감소시키는 역할을 한다. 이 때, 내부 탱크의 공간에서 빈 공간의 비율을 나타내는 투과율(Permeability) μ 가 사용되며, 이 값은 0≤μ≤1 범위에서 정의된다. 일반적으로 내부 탱크의 투과율은 0.95 이상의 값을 갖는다.
정상 상태의 정지된 수상 조건에서 내부 탱크 내 유체 표면 면적은 다음과 같이 정의된다.
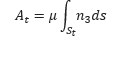
 : 내부 탱크의 액체 표면 면적
: 내부 탱크의 액체 표면 면적 : 탱크의 유체에 의해 젖어 있는 표면
: 탱크의 유체에 의해 젖어 있는 표면 : 내부 탱크 표면의 단위 법선 벡터 (Inward)
: 내부 탱크 표면의 단위 법선 벡터 (Inward) : 법선 벡터의 Z 방향 성분
: 법선 벡터의 Z 방향 성분
유체 표면 면적이 0인 경우, 내부 탱크가 완전히 유체로 다 차여진 상태(Fully Filled)를 의미한다. 내부 탱크 내 일정 량의 유체가 채워진 경우 내부 탱크 좌표계(Local Internal Tank Axes, LTA)의 원점은 부력 중심(Center of Flotation)에 위치한다. 이에 따라 전역 기준 좌표계(Fixed Reference axes, FRA)에서의 수평 위치는 다음과 같이 계산된다.
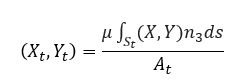
 : 내부 탱크의 중심 좌표(FRA 기준)
: 내부 탱크의 중심 좌표(FRA 기준)
탱크에 유체가 완전히 채워진 경우, LTA 원점의 위치는 탱크 위쪽으로 이동할 수 있으며, 내부 유체 부피의 중심을 지나는 수직선상에 위치하게 된다. 내부 탱크 내 유체의 부피는 젖은 표면에서의 적분을 통해 다음과 같이 정의된다.
 : 내부 탱크 내 유체 부피
: 내부 탱크 내 유체 부피 : LTA 기준 젖은 표면의 z-좌표
: LTA 기준 젖은 표면의 z-좌표
내부 탱크 내 유체 부피의 중심(무게 중심)은 다음과 같이 계산된다.
 : LTA 기준 질량 중심 좌표
: LTA 기준 질량 중심 좌표
FRA에서의 내부 탱크 내 유체 질량 중심 좌표는 아래와 같이 변환된다.
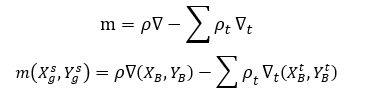
구조물과 내부 탱크 내의 유체를 포함한 전체 시스템의 질량 중심은 다음과 정의된다.
 : 구조물 자체의 질량
: 구조물 자체의 질량 : FRA 기준 구조물의 무게 중심(COG)
: FRA 기준 구조물의 무게 중심(COG) : 내부 탱크 내 유체 밀도
: 내부 탱크 내 유체 밀도 : 구조물에 포함된 모든 내부 탱크의 합
: 구조물에 포함된 모든 내부 탱크의 합
내부 탱크의 운동을 고려한 해석을 진행 시 Small Amplitude Motion을 가정하여 진행한다. 이는 내부 탱크의 운동 거동은 작으며, 선형화 운동 방정식으로 다룰 수 있다는 의미이다. LTA(Local Internal Tank Axes) 원점에서의 내부 탱크의 운동은 6x1 행렬 형태로 표현되며, 이 행렬은 내부 탱크의 병진 운동과 회전 운동을 포함하며, 기본적으로 강체 운동을 하게 된다.
![]() : 내부 탱크의 x,y,z 방향 변위
: 내부 탱크의 x,y,z 방향 변위
![]() : 내부 탱크의 rx,ry,rz 회전 변위
: 내부 탱크의 rx,ry,rz 회전 변위
■ 2) Internal Tank Basic Motions
전체 구조물과 결합된 무게 중심(CoG)에서의 운동 벡터는 아래와 같이 표현되며, 이 때 내부 탱크의 운동은 아래의 변환 행렬을 이용하여 표현된다.
 : 3x3 단위 행렬
: 3x3 단위 행렬 : 강체 운동으로 인해 발생하는 회전 효과를 고려한 변환 행렬
: 강체 운동으로 인해 발생하는 회전 효과를 고려한 변환 행렬
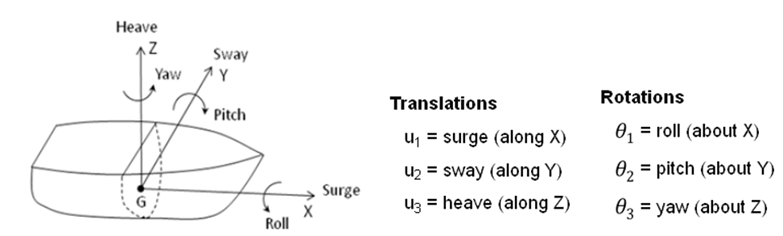
그림 6 Floating Rigid Motions
내부 탱크의 운동은 아래의 R 행렬을 통해 내부 탱크의 위치와 전체 시스템의 무게 중심과 어떻게 연결되는지 나타내고 있다.

■ 3) Hydrostatic Force and Moment due to Internal Tank
유체가 담긴 내부 탱크에 작용하는 정수력(Hydrostatic Force)은 유체의 부력에 의해 발생하며, 아래와 같이 표현되며, 탱크 내 유체 높이에 비례하여 정수력이 증가함을 알 수 있다.
 : 내부 탱크의 투과율(Permeability)
: 내부 탱크의 투과율(Permeability) : 내부 탱크 내 유체 밀도
: 내부 탱크 내 유체 밀도 : 중력가속도
: 중력가속도 : 내부 탱크 내 젖어 있는 표면(Wetted Surface)
: 내부 탱크 내 젖어 있는 표면(Wetted Surface) : 내부 탱크 좌표계(LTA) 기준 높이 좌표
: 내부 탱크 좌표계(LTA) 기준 높이 좌표 : 내부 탱크 표면의 단위 법선 벡터(Inward)
: 내부 탱크 표면의 단위 법선 벡터(Inward)
LTA(Local Internal Tank Axes) 원점을 기준으로 내부 탱크에 작용하는 정수 모멘트(Hydrostatic Moment)는 다음과 같이 표현하게 되며, 탱크 내 유체의 높이 및 질량 중심에 따라 모멘트가 결정됨을 나타내고 있다.

 : 내부 탱크 좌표계에서의 위치 벡터
: 내부 탱크 좌표계에서의 위치 벡터
내부 탱크의 유체에 의한 정수력 및 모멘트의 일반적인 표현을 행렬 형태로 나타내면 아래와 같으며, 내부 탱크의 정수력 및 모멘트가 구조물 전체의 좌표계에 어떻게 변환되는지를 표현하고 있다.
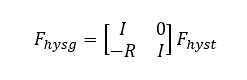
 : 원점 기준의 정수력 및 모멘트
: 원점 기준의 정수력 및 모멘트 : 단위 행렬
: 단위 행렬 : 회전 변환 행렬
: 회전 변환 행렬
유체가 담긴 내부 탱크를 포함한 전체 부유체 구조물이 정수상태에서 자유롭게 부유하는 경우, 정수 평형(Equilibrium Position)을 만족하기 위해서는 아래의 조건이 충족되어야 한다.
![]() : 구조물의 질량
: 구조물의 질량
![]() : 외부 수중 밀도
: 외부 수중 밀도
![]() : 구조물이 밀어낸 물의 체적(배수량)
: 구조물이 밀어낸 물의 체적(배수량)
![]() : 내부 탱크 내 유체 밀도
: 내부 탱크 내 유체 밀도
![]() : 내부 탱크 내 유체 부피
: 내부 탱크 내 유체 부피
![]() : FRA(Fixed Reference Axes) 기준 구조물 질량 줌심
: FRA(Fixed Reference Axes) 기준 구조물 질량 줌심
![]() : FRA 기준 부력 중심
: FRA 기준 부력 중심
![]() : FRA 기준 내부 탱크 내 유체 부력 중심
: FRA 기준 내부 탱크 내 유체 부력 중심
■ Internal Tank 기능 적용 방법
Ansys WB 환경에서 Aqwa는 internal tank 기능을 쉽고 편리하게 적용할 수 있다. 아래와 같이 ‘Internal Tank’를 추가한 후 유체가 담겨 있는 탱크 모델을 선택한 후 탱크 및 유체 속성을 정의하면 된다. ‘Internal Tank Surfaces’는 탱크를 구성하는 다수의 geometry 도 선택할 수 있다. ‘Fluid Level Definition Mode’를 이용하여 탱크 내 유체 표면 레벨 또는 체적을 정의할 수 있으며, 크게 3가지 방법을 지원하고 있다.
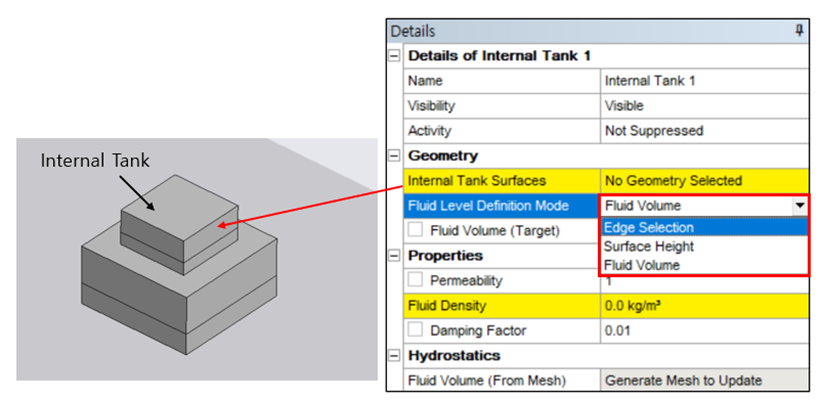
그림 7 Details of Internal Tank
‘Edge Selection’를 이용한 탱크 내 유체의 free surface가 되는 면의 edge를 선택하여 정의하는 방법과 ‘Surface Height(in Global Axes)’를 이용하여 탱크 모델 내의 유체 표면 높이를 전역 좌표계 기준으로 직접 입력하는 방법이 있다. 마지막으로 탱크 모델 내의 유체 영역의 체적을 직접 입력하는 ‘Fluid Volume(Target)’ 방법이 있다. ‘Surface Height(in Global Axes)’과 ‘Fluid Volume(Target)’ 방법에서 유체 표면 높이와 체적은 변수 지정이 가능하여 parameter study 및 최적화 해석에 활용할 수 있다.
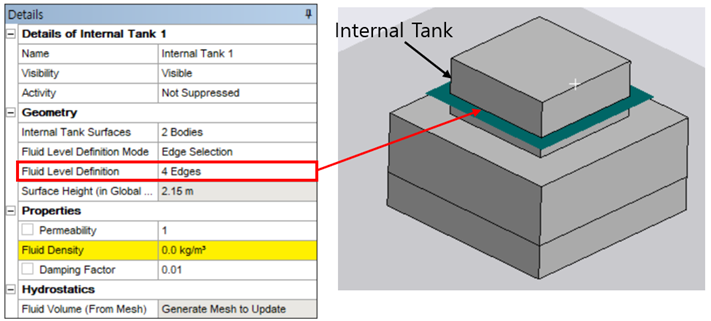
그림 8 Fluid Level Definition
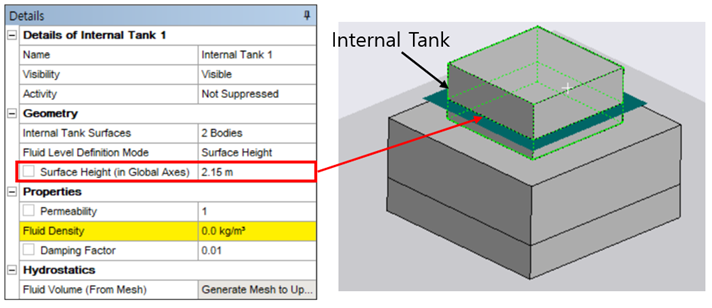
그림 9 Surface Height(in Global Axes)
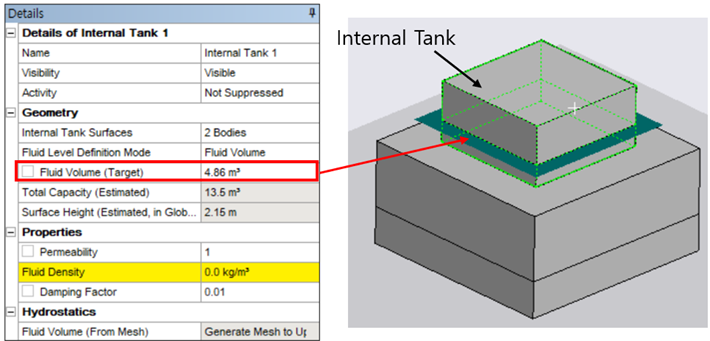
그림 10 Fluid Volume(Target)
탱크 내 유체의 free surface 높이 혹은 체적을 정의를 하였다면, 추가적인 속성을 정의하여야 한다. Permeability(μ)는 탱크 내 보강재 및 설비 등과 같은 구조물 영역을 제외한 유체가 차지하는 비율을 의미하며, 앞서 설명했듯이 0<μ<1 사이의 값을 적용할 수 있는데, μ=1이라면 탱크 내부가 완전히 유체로 다 채워져 있다고 보면 된다. Fluid Density는 유체의 밀도, Damping Factor는 유체 운동 감쇠를 위한 댐핑 계수를 의미한다.
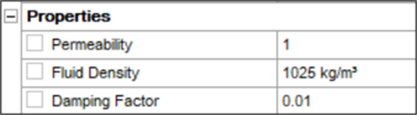
그림 11 Fluid의 Properties
■ Internal Tank 기능을 이용한 LNG 운반선의 Hydrodynamic 해석
Ansys WB 환경에서 LNG 운반선의 운동 해석 진행 방법에 대해 예제 모델을 이용하여 설명하고자 한다. LNG 운반선의 운동 해석을 진행하기 위해서는 아래와 같이 ‘Mesh’, ‘Hydrodynamic Diffraction’, ‘Hydrodynamic Response’ 시스템으로 구성한다.

그림 12 해석 시스템 (Ansys Workbench)
Mesh(System A)에서는 LNG 운반 선박 모델 구성 및 hydrodynamic 격자 생성 작업을 진행하였으며, Hydrodynamic Diffraction(System B)에서는 LNG 운반선의 고유치 해석을 수행하였으며, Hydrodynamic Response(System C, D)에서는 stability 및 time domain 해석을 각각 진행하였다.
■ 해석 모델
아래와 같이 선체 및 화물창을 고려한 Moss type의 LNG 운반 선박 모델을 Mesh의 Geometry(A)의 Ansys SpaceClaim에서 구성하거나 geometry 모델을 불러와서 해석을 위한 모델로 수정한다. Ansys Aqwa를 이용한 hydrodynamic 해석을 진행하기 위해서는 surface body로 구성하여야 하며, 흘수는 8m로 절대 좌표축 원점에 맞추었다. 또한 탱크 내 유체 Level 정의를 위해 내부 탱크 모델을 분할하였다.
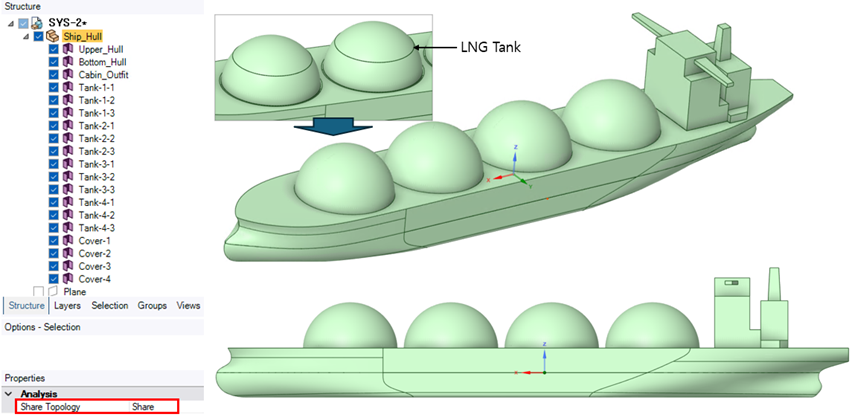
그림 13 Moss type LNG 운반선 모델
LNG 운반선 전체 모델은 흘수에 따라 surface body가 분할되어야 하며, 전체 운반선의 part들은 ‘Share Topology’ 옵션을 ‘Share’로 설정해야 한다. 해석 모델 구성이 완료되면 Mesh(A)에서 아래와 같이 hydrodynamic mesh 작업을 진행하여, Ansys Aqwa를 이용한 hydrodynamic 해석 준비를 한다. 아래의 LNG 운반선 모델의 격자 사이즈는 1.3m이다.
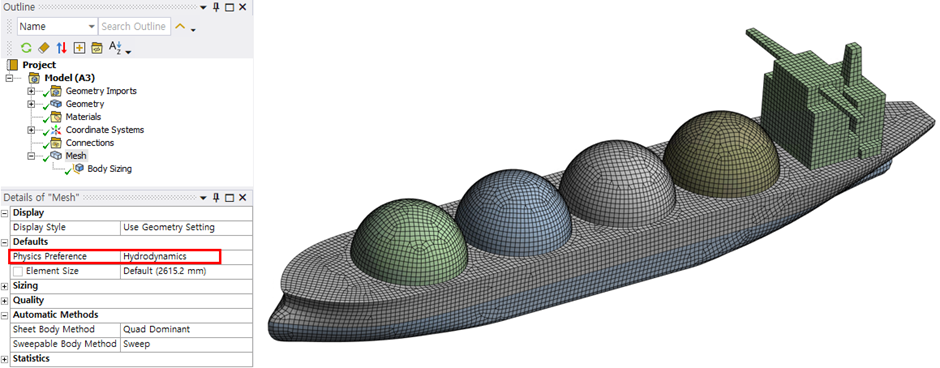
그림 14 LNG 운반선의 hydrodynamic mesh model
■ Hydrodynamic Diffraction
Hydrodynamic 격자를 구성한 LNG 운반선 모델을 ‘Hydrodynamic Diffraction’ 시스템에 공유하면 Ansys Aqwa 해석 환경으로 이동하여 Water 영역에 LNG 운반 선박 모델이 위치하게 된다.
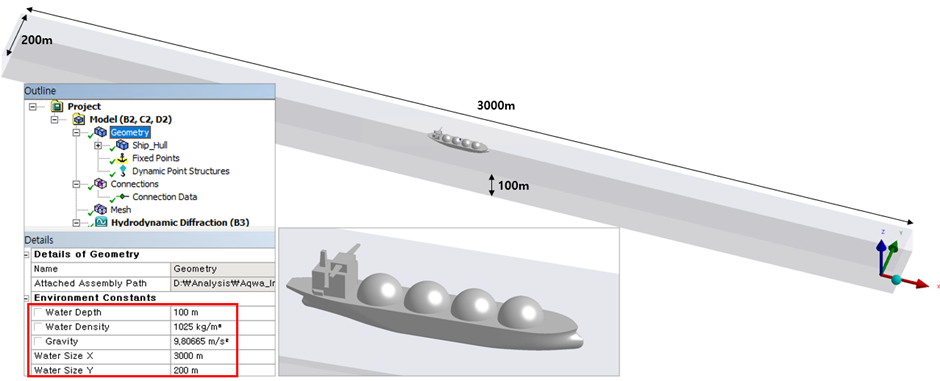
그림 15 LNG 운반선 모델 & water 영역 형상 및 환경 변수
그림 15와 같이 water 영역의 크기를 입력한 후 그림 16과 같이 선박 모델에 ‘Point Mass’를 추가하여 무게 중심과 선박의 총 중량, 관성 값을 입력한다.
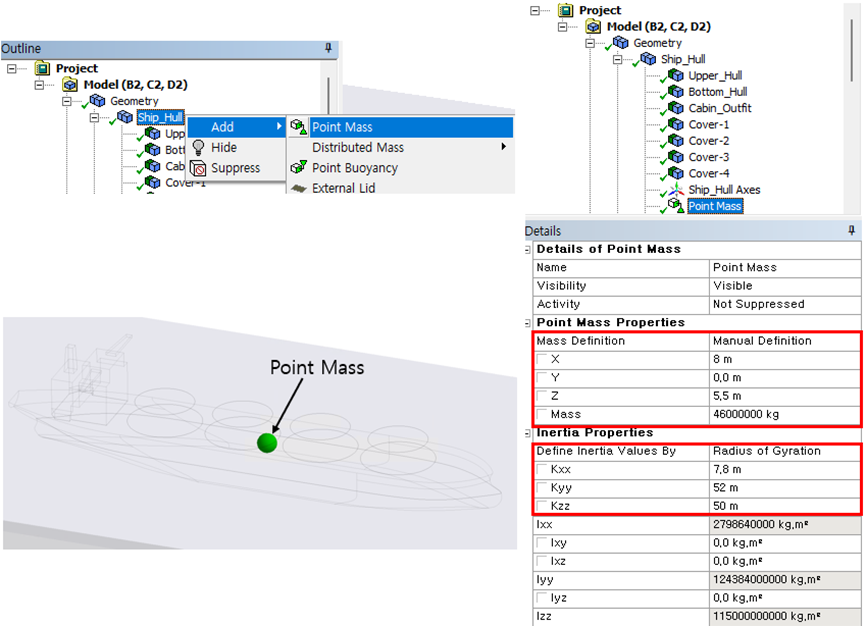
그림 16 LNG 운반선의 Point Mass(Inertia) 정보
LNG 운반선 내 탱크의 유체에 의한 sloshing 효과를 고려하기 위해서 선박 모델에서 internal tank를 추가하여 각 탱크에 해당되는 geometry들을 모두 선택한다. 본 예제 모델에서는 유체 레벨 정의는 Edge를 선택하여 적용하였고, Permeability는 0.95, LNG의 밀도는 449.1kg/m3, 댐핑 계수는 0.01로 적용하였다. 모두 4개의 탱크 모델에 동일한 방법으로 Internal Tank를 각각 적용한다.
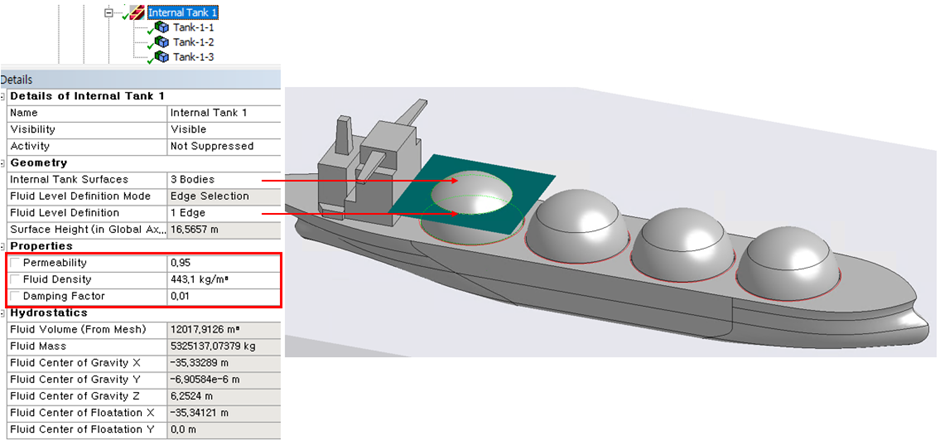
그림 17 LNG 운반선 내 Internal Tank Properties
Internal Tank의 속성을 정의하게 되면, 앞장에서 설명했던 수식들을 이용하여 LNG 영역의 체적과 질량, 무게 중심을 계산하고, 그 결과를 상세창에서 확인할 수 있다. 이 속성들이 전체 선박의 질량 및 무게 중심 등에 반영되어 전체 LNG를 고려한 선박 전체 거동 특성을 계산하게 된다.
Hydrodynamic Diffraction의 Analysis Setting에서 아래 그림과 같이 세팅을 한 후 Solve 버튼을 눌러 해석을 진행한다.
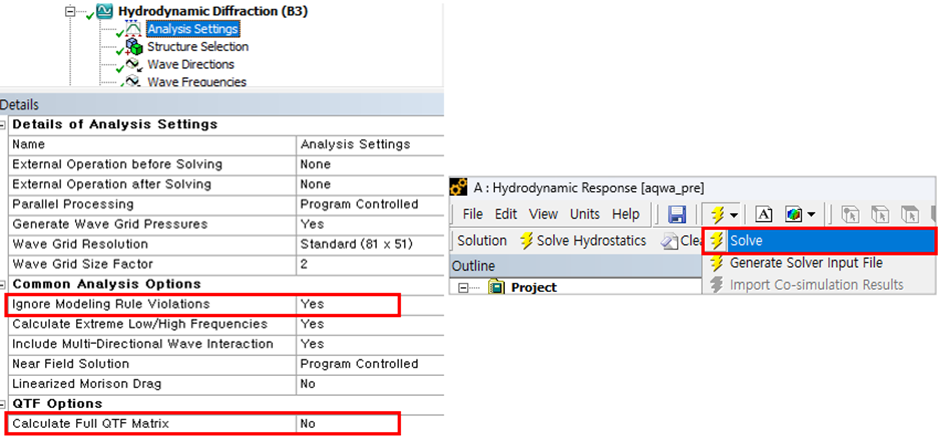
그림 18 Hydrodynamic Diffraction Analysis Setting & Solve Button
■ Hydrodynamic Response(Stability & Time Domain)
Hydrodynamic Diffraction 계산이 완료되면, Hydrodynamic Response Stability 해석을 진행해야 한다. Stability 해석이란 설계한 선박에 대한 안정적 상태 도출 및 검토를 위한 해석으로 선박의 중량과 계류선, 중간 부이, 내부 유체 탱크, 환경 하중 등에 따른 stability 상태를 도출하기 위함이다. 예를 들어 계산한 흘수보다 중량이 초과되거나 감소될 경우 선박이 더 가라 앉거나 떠오르게 되는 상태가 된다.
도출한 stability 상태가 운반선의 초기 상태가 되며, 이 상태를 기준으로 frequency domain 또는 time domain 해석을 수행하여 실제 환경 하중에 대한 최대 응답 혹은 시간에 따른 실제 거동을 도출하게 된다.
Hydrodynamic Diffraction과 연결되어 있는 첫 번째 ‘Hydrodynamic Response(C)’(그림 12참고)의 Analysis Setting에서 아래와 같이 ‘Computation Type’을 ‘Stability’로 설정 후 기본 세팅을 기반으로 Solve 버튼을 눌러 stability 해석을 진행한다. 본 예제 운반선 모델의 stability 해석에서는 별도의 경계조건은 적용하지 않았다. 본 예제의 LNG 운반 선박의 stability 해석은 몇 번의 iteration으로 정상적으로 계산이 완료하였음을 확인할 수 있다.
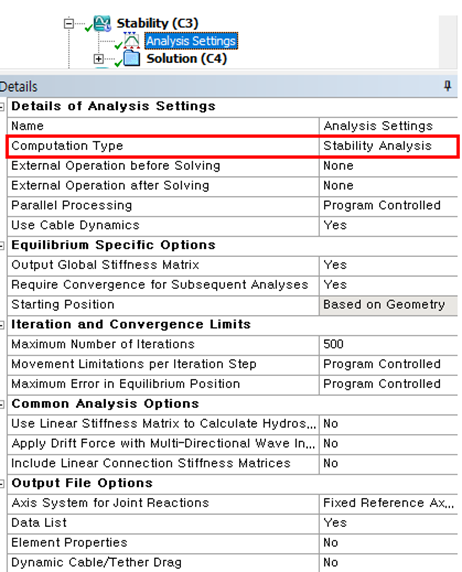
그림 19 Hydrodynamic Response(Stability) Analysis Setting
‘Hydrodynamic Response(C)’의 stability 계산이 완료되면, ‘Hydrodynamic Response(D)’의 time domain 해석을 수행하게 된다. Time domain 해석을 통해 LNG가 실려 있는 선박에 실제 환경 하중을 고려하여 시간에 따른 선박의 응답을 도출할 수 있다. ‘Hydrodynamic Response(D)’의 ‘Analysis Settings’에서 아래 그림과 같이 설정을 한다.
 Analysis Setting.png")
그림 20 Hydrodynamic Response(Time Domain)의 Analysis Settings
‘Computation Type’을 ‘Time Response Analysis’로 설정하고, 불규칙 파도 조건 적용을 위해 ‘Analysis Type’은 ‘Irregular Wave Response’로 설정하고, ‘Duration’은 120s로 입력한다. 환경 하중 조건은 아래와 같이 irregular wave인 Pierson-Moskowitz 모델을 적용하였고, 파고는 3m, Zero Crossing Period는 5s, ‘Direction of Spectrum’은 선박의 진행 반대 방향(180°)으로 적용하였다.
.png")
그림 21 Irregular Wave(Pierson-Moskowitz)

그림 22 Starting Conditions
선박의 initial velocity를 적용하기 위하여 ‘Starting Condition’을 추가하여 초기 속도 10.29m/s를 적용한다. Initial velocity 조건은 2025R1으로 업데이트되면서 ‘Starting Condition’ 기능 내에 추가되어 효율적인 해석이 가능하게 되었다. 해석 조건을 적용한 후 동일한 방법으로 time domain 해석을 진행한다.
또한, 탱크 내 유체를 고려한 선박 결과를 비교 검토를 하기위해 탱크 내 유체가 없는 LNG 선박에 대해서도 위와 동일한 절차와 해석 조건으로 hydrodynamic 해석을 수행하였다.
■ 해석 결과
■1) Hydrodynamic Diffraction
Hydrodynamic Diffraction 계산이 완료되면, ‘Hydrostatic Result’를 추가하여 선박의 부심 및 무게 중심과 small angle stability 변수들을 확인할 수 있다. 아래는 hydrostatic result 결과를 나타내고 있다.
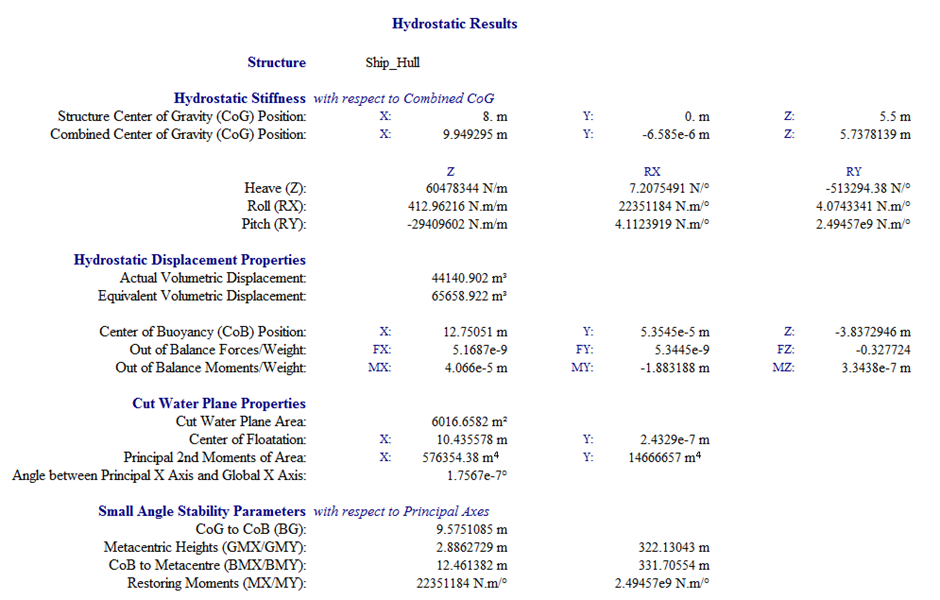
그림 23 Hydrostatic Results
아래는 LNG가 담긴 탱크를 고려한 운반선과 비어 있는 탱크 운반선의 180° 방향의 wave에 대한 RAO를 자유도 별로 각각 비교하였다. LNG가 없는 운반선의 응답이 더 크게 나타나는 것을 확인할 수 있다.
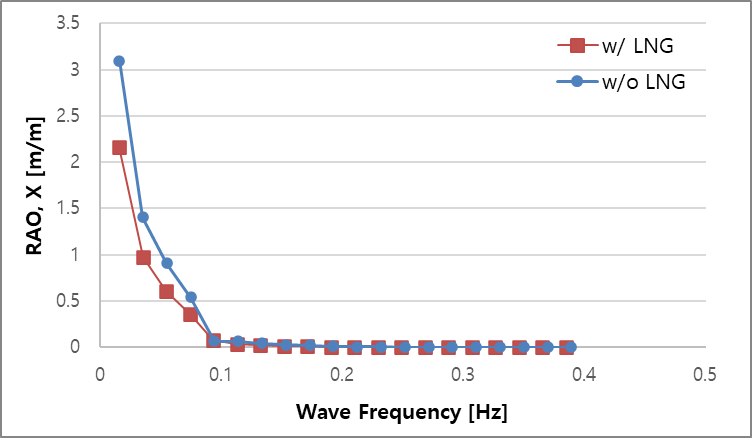
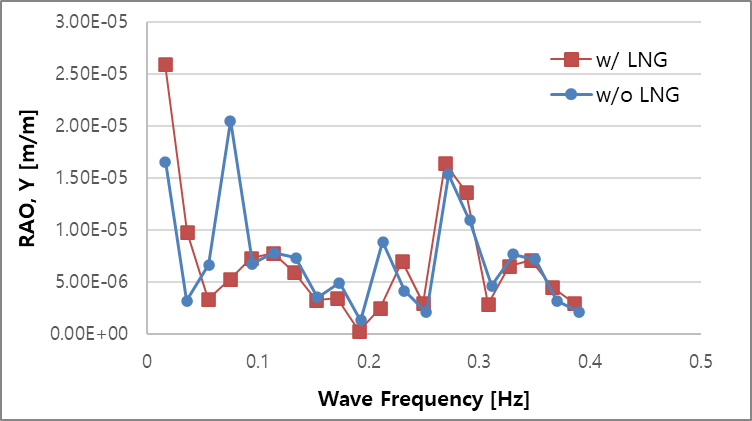
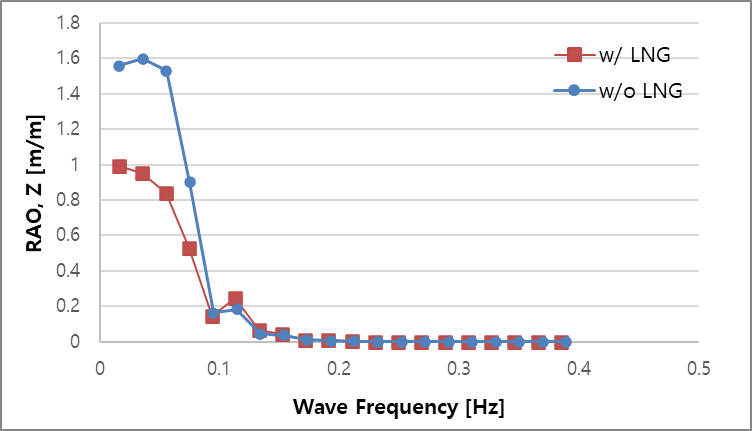
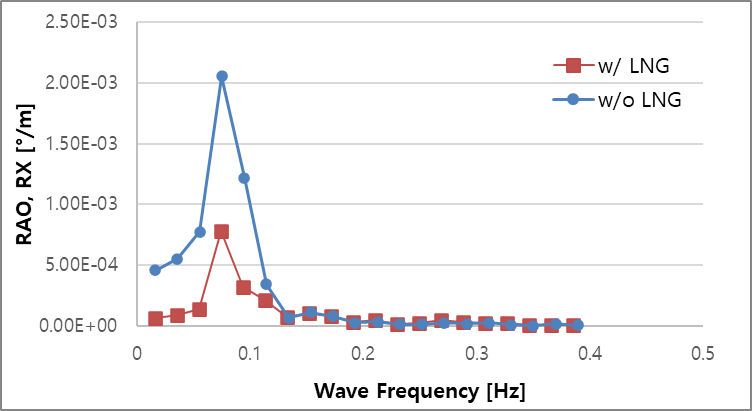
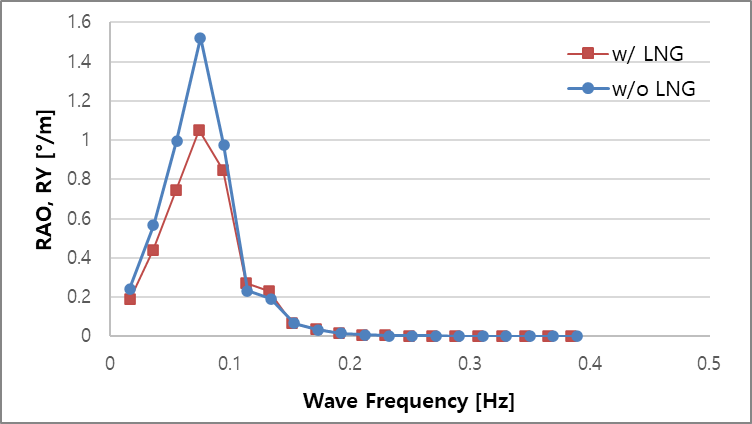
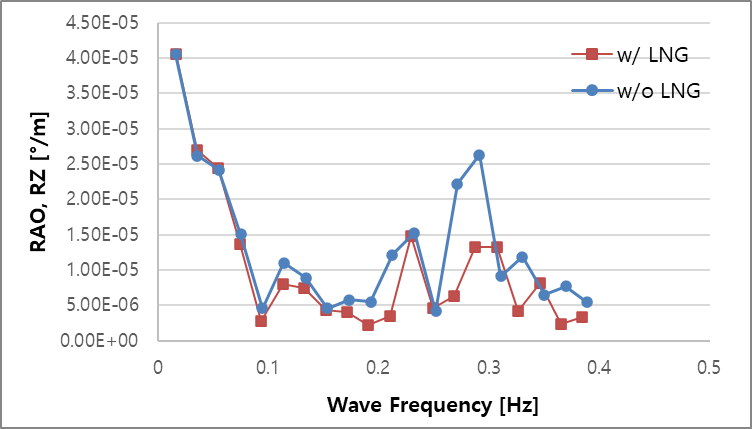
그림 24 RAOs(Wave Direction 180°)
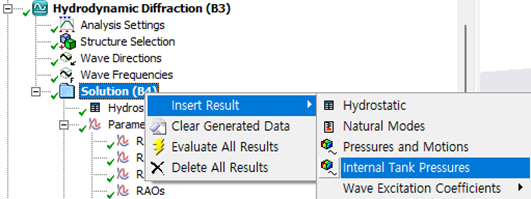
그림 25 Pressures and Motion & Internal Tank Pressures
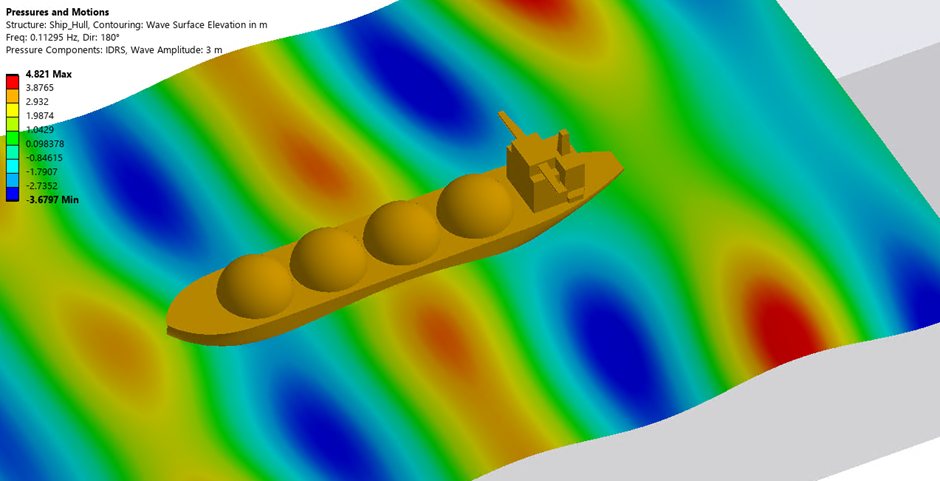
그림 26 Wave Surface Elevation(Wave Direction 180°, 0.1129Hz, Incident Wave Amplitude 3m)
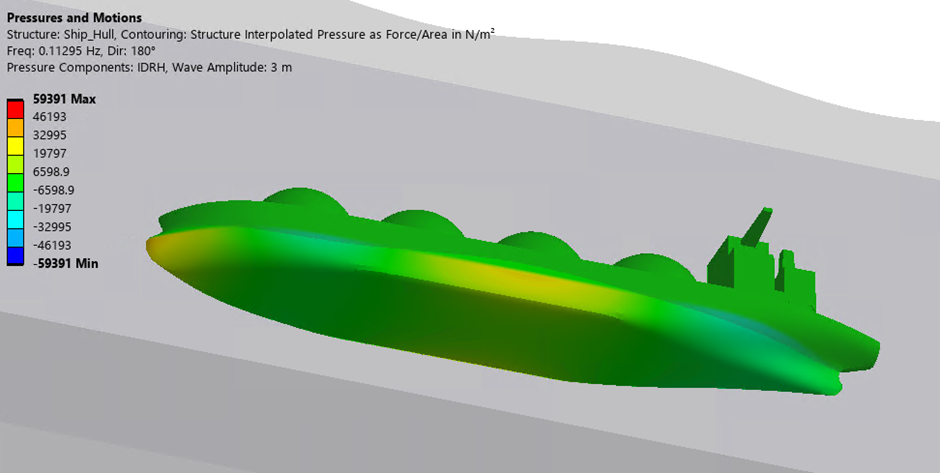
그림 27 Structure Pressure(Wave Direction 180°, 0.1129Hz, Incident Wave Amplitude 3m)
그림 26에서는 주파수 0.11295Hz, 파고 3m, 180° 방향의 wave가 운반선에 적용될 때의 diffraction 및 radiation 효과 등이 고려된 wave의 높낮이를 나타내고 있으며, 그림 27에서는 동일한 조건일 때의 운반선 침적부에 걸리는 패널 압력을 나타내고 있다. 또한 그림 28과 같이 동일한 조건일 때의 internal tank에 걸리는 압력을 확인할 수 있다.
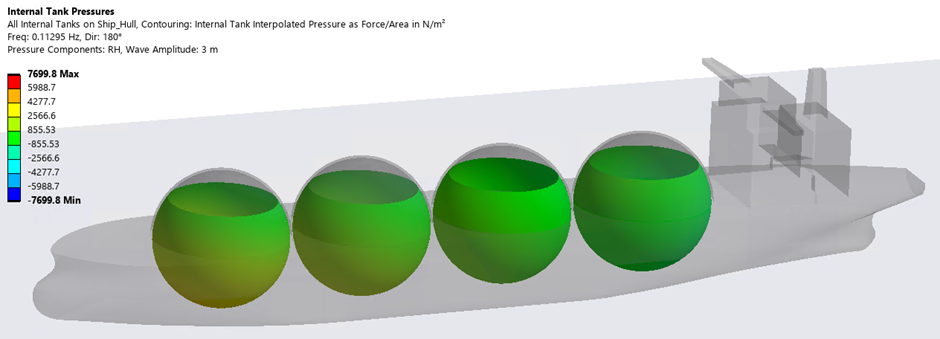
그림 28 Internal Tank Pressure(Wave Direction 180°, 0.1129Hz, Incident Wave Amplitude 3m)
■ 2) Hydrodynamic Response(Stability)
Hydrodynamic response의 stability 계산이 완료되고 난 후 가장 먼저 stability 상태를 확인한다. 아래의 결과는 heave 방향으로의 운반선의 위치를 나타내고 있으며, LNG가 탱크에 실려 있는 운반선이 상대적으로 중량이 더 나가므로 더 가라앉았음을 확인할 수 있다. Iteration step은 반복 계산 수이며, position은 무게 중심 위치를 의미한다. 이 상태가 time domain 해석을 위한 초기 position이 된다.
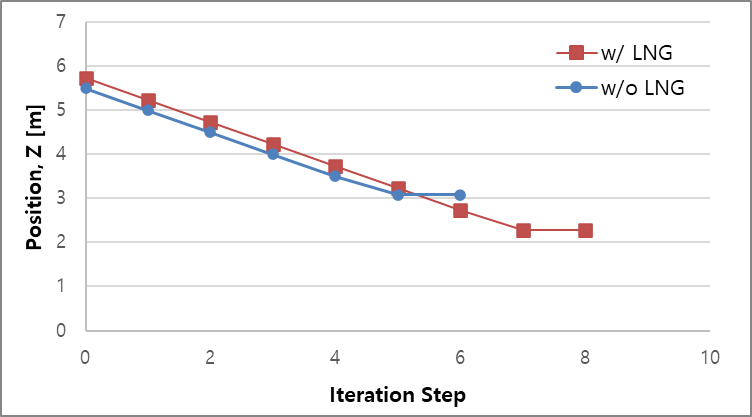
그림 29 Stability(Real Structure Position, Z)
그림 30은 LNG 유무에 따른 운반선의 고유주파수를 비교하고 있다.
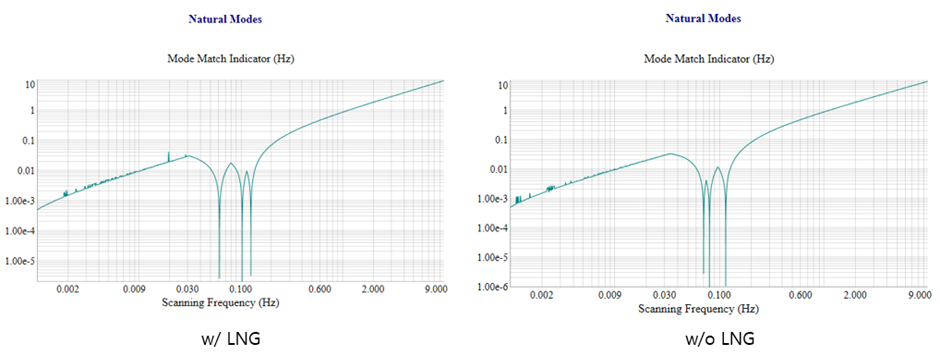
그림 30 Natural Frequency(LNG 적재 유무에 따른 비교)
■ 3) Hydrodynamic Response(Time Domain)
Time domain 해석 결과 중 실제 환경 하중을 고려하였을 때 LNG를 실은 운반선이 운항하여 시간에 따라 10.29m/s의 속도로 이동하는 결과를 아래의 그림에서 나타내고 있다. 적용한 irregular wave의 파고를 색깔로도 표현이 가능하여 파고를 좀 더 가시화하여 볼 수 있다.
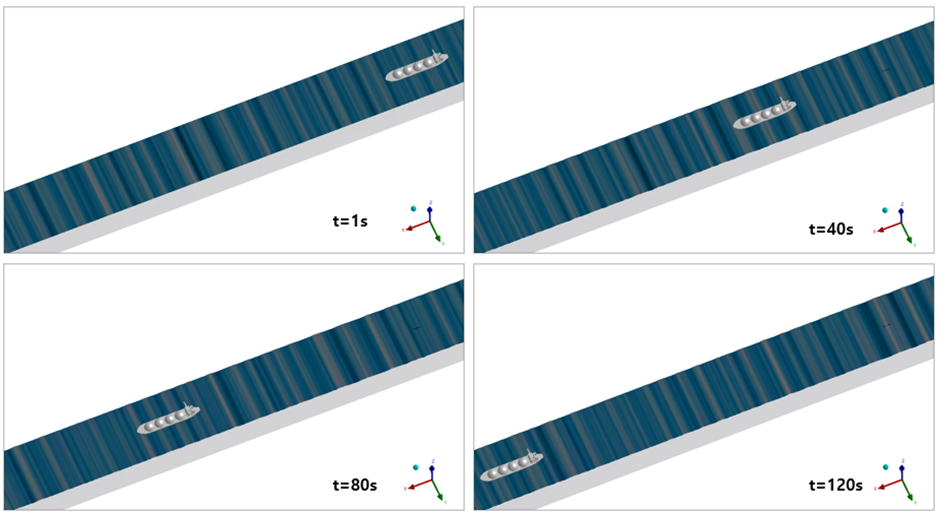
그림 31 LNG 운반선의 시간에 따른 거동
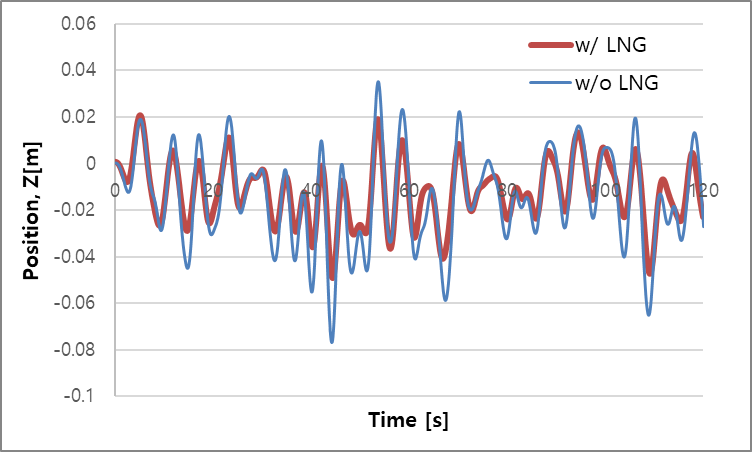
그림 32 LNG 적재 유무에 따른 운반선의 Heave 거동 비교
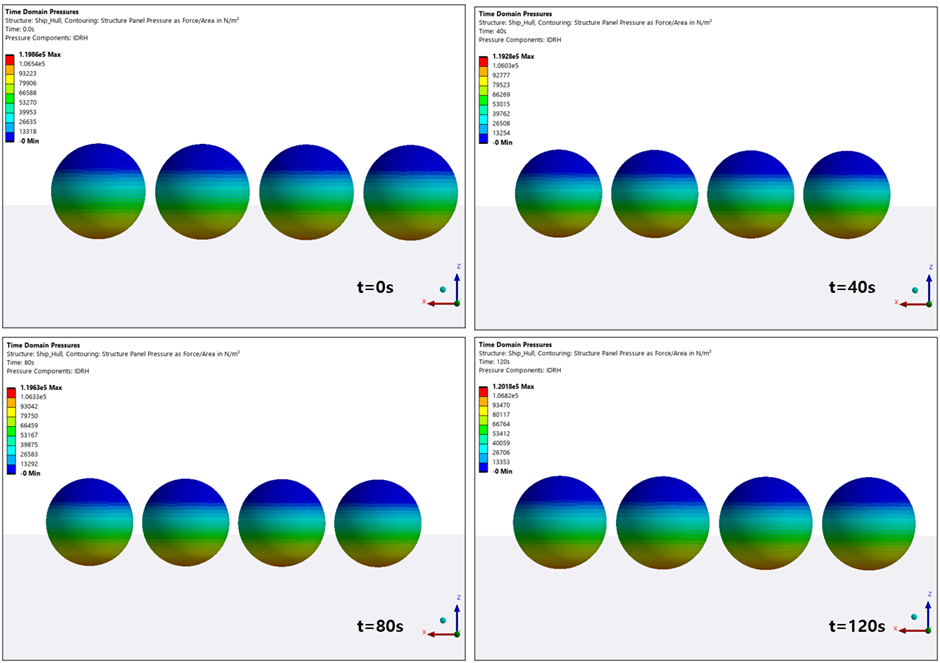
그림 33 시간에 따른 Internal Tank 내 압력 분포
그림 32는 LNG 적재 유무에 따른 운반선의 실제 환경 하중인 irregular wave를 고려하였을 때 heave 방향(z)의 거동을 시간에 따라 나타내고 있다. LNG를 적재하지 않은 선박 모델이 시간에 따른 응답이 더 크게 나타남을 확인할 수 있다. 또한, 그림 33과 같이 시간에 따른 유체에 의한 LNG Tank에 걸리는 압력 분포도 출력할 수 있다. 이러한 탱크 내 압력 데이터는 구조 해석 모델에 전달하여 맵핑이 가능하며, 구조 해석에 반영하여 탱크의 구조 검토를 진행할 수 있다.
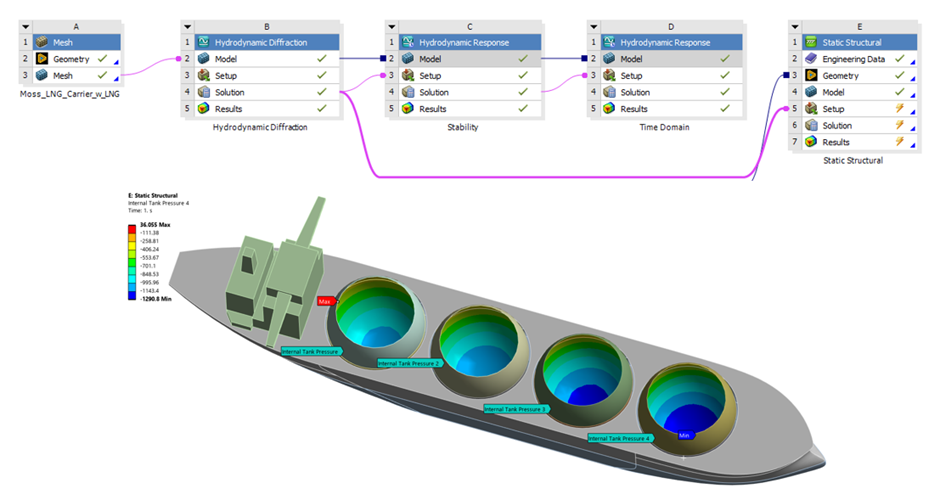
그림 34 Mechanical 환경에서 internal tank pressure의 Mapping
이처럼 Ansys Aqwa에서 LNG 선박의 hydrodynamic 해석을 진행하여 바람, 파도, 조류 등의 환경 조건에 따른 sloshing 현상을 고려한 선박의 응답 거동 특성 및 설계의 지표 데이터, 운항 안정성 검토를 위한 다양한 결과 데이터들을 도출할 수 있다.
■ 맺음말
이번 호에서는 Ansys Aqwa를 이용한 LNG 선박의 Hydrodynamic 해석 진행 방법에 대해 알아보았다. 위에서 설명하였듯이 2019 버전부터 WB 환경에 추가된 ‘Internal Tank’ 기능을 이용하여 내부 유체의 sloshing 현상을 다룰 수 있게 되었다. 이 기능을 이용하여 Ansys WB 환경에서 membrane 형태의 LNG 운반선 이외에도 다양한 선박 및 해양 구조물 내 유체를 고려한 구조체의 응답을 쉽고 편리하게 도출할 수 있으므로 여러 분야에 적용할 수 있다. 또한 실제 해상 환경 조건을 고려한 LNG 운반선의 화물창 설계 및 구조 검토를 위한 구조 해석의 하중으로 간편하게 전달 및 맵핑이 가능하므로 구조 해석 및 탱크 설계에 활용할 수 있을 것으로 기대한다.



 ㈜태성에스엔이
㈜태성에스엔이-
- 대표이사 : 심진욱, 박인규
- 사업자등록번호 : 219-81-23192
- 통신판매업 신고번호 : 제2017-서울성동-1100호
ⓒ TAE SUNG S&E Inc.



