
ANZINE : CAE 기술 매거진
이전 ANZINE Home Tech-Insight



Ansys Digital Twin 2025 R1 업그레이드
- 송채영 매니저
- 태성에스엔이
- cysong@tsne.co.kr
Ansys Digital Twin 2025 R1 업그레이드
Introduction
이번 챕터에서는 Ansys Digital Twin이라고 불리는 Ansys Twin Builder©와 Ansys TwinAI™(구 Ansys Twin Deployer)에 대한 간략한 소개와 2025 R1 버전에서 어떠한 개선 사항이 있는지 소개하고자 한다.
■ Ansys Digital Twin
Digital Twin은 물리적 자산에 연결된 가상 복제본으로, 자산에 장착된 센서는 데이터를 수집하고 물리 모델로 전달하여 디지털 트윈이 해당 제품의 실제 경험을 미러링 한다.
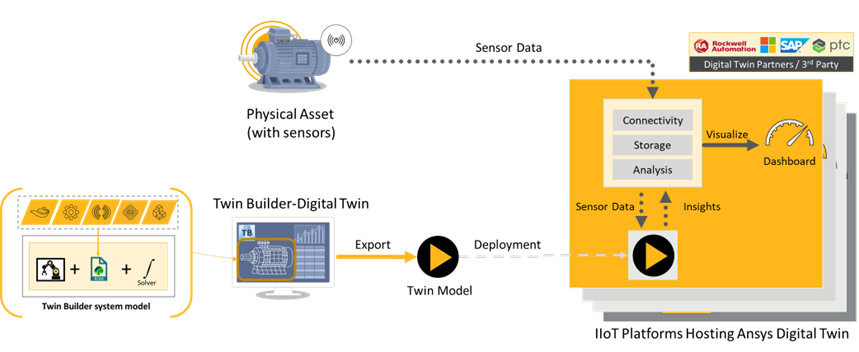
[그림 1] 시뮬레이션 기반 디지털 트윈을 실제 자산과 연동하여 IIoT 플랫폼에 구현
Ansys는 다년간의 시뮬레이션 기술을 바탕으로 다양한 산업군의 제조업체가 Digital Twin을 빠르고 쉽게 생성하고 검증 및 배포할 수 있는 포괄적인 시뮬레이션 기반 도구를 제공한다.
Ansys Twin Builder를 사용하면 디지털 트윈에 사용할 Twin 모델 구축이 용이하며 검증과 최적화도 가능하고 Ansys의 협력 IIoT 플랫폼에 배포할 수 있다. 게다가 Ansys Digital Twin은 Open Ecosystem을 지원하므로, 외부 소프트웨어의 플랫폼에도 배포할 수 있다. 이때는 Ansys TwinAI를 이용하여 모델 컴파일이 필요하다. TwinAI는 이처럼 배포에 쓰일 뿐만 아니라, 생성된 디지털 트윈과 센서 데이터 등 실제 데이터를 이용하여 모델을 실제와 더 가깝게 보정하는 Hybrid Analytics 기능을 보유하여 가장 정확한 디지털 트윈을 구축할 수 있도록 한다.
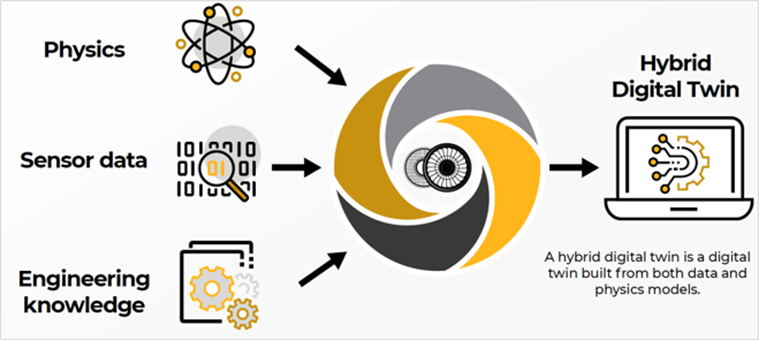
[그림 2] 머신 러닝 기술로 가장 정확한 하이브리드 디지털 트윈을 구축할 수 있음
디지털 트윈을 구축하면 단순히 기계를 판매하는 것이 아니라 제조업체는 해당 기계와 관련된 “가동 시간”을 판매할 수 있다. 제조업만이 아니라 에너지 관리 측면에서는 에너지 사용량을 줄이고 효율을 높이는데 사용이 가능하며 건설 업계에서는 안전한 건설 프로세스를 보장하면서 시공 기간을 단축할 수 있고 자동차 업계에서는 사용자 경험을 보장하는 신제품 생산에 도움이 될 수 있다.
이처럼 디지털 트윈을 적용하면 평균적으로 에프터마켓 서비스에서 약 25%의 마진을 얻을 수 있다. 게다가 디지털 트윈은 값비싼 자산에 대한 예측 및 예방적 유지 관리를 가능하게 하여 보증 및 보험 비용을 절감하고 제품 운영을 사전에 최적화할 수 있으며 모든 기존 산업군의 사업 방식을 혁신할 잠재력을 가지고 있다.
■ Ansys Twin Builder 소개 및 개선 사항
디지털 트윈 제품군 중 Ansys Twin Builder의 역할은 Twin model의 Building 및 Validating에 해당한다. Twin Builder에서는 복잡한 물리 모델을 시스템 해석에 적용할 수 있도록 단순화하는 기술인 ROM(Reduced Order Model)을 다양한 형태로 제공하고 있다. 그 중에서 특히, ROM Builder를 이용해 생성한 ROM은 Scalar 데이터만이 아니라 복잡한 Vector Field도 확인할 수 있다.
ROM Builder는 ROM 생성을 위해 3D physics 해석 결과를 학습 데이터로 사용한다. ROM Builder를 이용하여 만들어지는 ROM은 시간에 따른 변화의 유무에 따라서 Static ROM 혹은 Dynamic ROM으로 나뉜다. 시간을 고려하는 지의 여부에 따라 방법론은 조금 다르지만 ROM Builder를 이용하면 주어진 학습 데이터에서 기저(basis)를 추출하여 모델의 주요 패턴을 추출한 후 새로운 공간에 투영(projection)하는 과정을 거쳐서 복잡한 3D 해석 데이터를 1D 수준의 시스템 해석에서 사용할 수 있는 ROM으로 만들어준다.
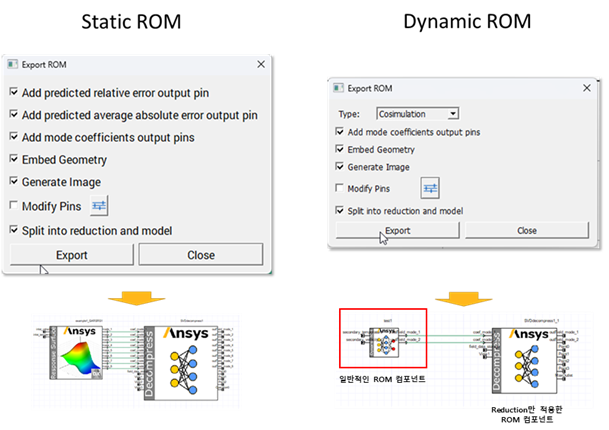
[그림 3] ROM Builder에서 projection ROM과 reduction ROM을 모두 추출할 수 있음
완성된 ROM은 추출하여 일반적인 시스템 라이브러리의 컴포넌트처럼 사용할 수 있다. 거기에 더하여, 2025 R1에서부터는 투영 전 단계, 즉, 기저를 추출한 단계의 모델을 추출할 수 있다. 이러한 모델은 데이터 분석 및 가시화에 적용하여 시스템의 주요 거동을 이해하는데 사용할 수 있으며 지배적인 물리 현상을 분석할 수 있다. 또한 추출된 기저를 바탕으로 직접 projection을 거쳐 ROM을 생성할 수도 있다. 또한, ROM 간 연결을 통해 데이터를 주고받을 때, 후속 ROM에 시스템의 주요한 동적 특성을 그대로 정확하게 전달하는데 사용할 수 있으며 모드 자체를 활용하여 머신 러닝에 적용할 수도 있다.
Dynamic ROM Builder는 ROM Building 과정에서 학습에 사용되는 초기화(initialization)를 사용자가 지정할 수 있도록 변경되었다. 기본 설정으로는 이전과 동일하게 시나리오가 정상 상태에서 시작한다고 가정하는 steady state 방법이 적용되지만 사용자가 원하는 경우 학습에 사용한 시나리오 또는 좁은 궤적(from trajectory)에 대한 데이터로 초기화할 수 있다. Steady state에서 초기화를 한다면 안정적이라는 장점이 있지만 물리적으로 의미 있는 임의의 초기 조건을 설정하면 수렴 속도를 높이고 보다 현실적인 결과를 도출하는 ROM을 생성할 수 있다. 특히 복잡한 유동 문제에서는 전략적으로 초기화를 설정하는 것이 중요하므로 다양한 초기화 설정이 가능하다는 것은 주요 개선사항이라고 할 수 있다.
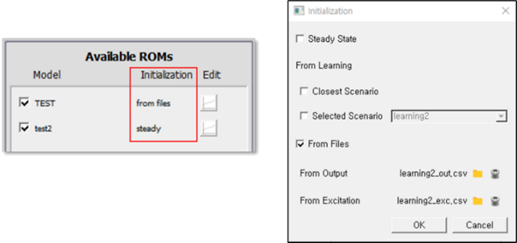
[그림 4] Dynamic ROM Builder의 initialization 방법의 다양화
좁은 궤적이란, 예를 들어, 초기 시작 위치가 0이 아닌 경우, t=1000s 등과 같이 ROM 생성 시 참조 데이터의 범위가 제한적인 경우를 의미하며 From Files라는 옵션을 통해 해당 excitation과 output을 initialization에 사용할 수 있다.
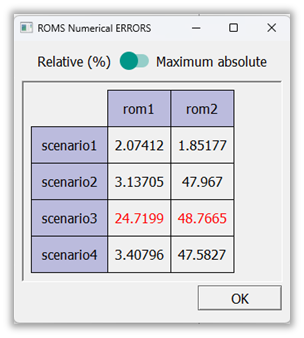
[그림 5] 2025R1 Dynamic ROM Builder ROM error summary
Dynamic ROM Builder에는 생성한 Dynamic ROM은 추출하기 전, 생성한 ROM과 학습에 적용한 시나리오 간의 에러를 확인할 수 있는 ‘ROM Errors summary’ 기능이 있다. 기존에는 생성된 ROM과 학습에 사용된 시나리오 간의 에러율을 확인할 수 있는 옵션이었으나 2025 R1에서는 개선되어 검증용 시나리오와의 에러도 한 번에 확인할 수 있게 되어 가시성이 좋아졌다.
ROM만이 아니라 시스템 라이브러리에서도 큰 변화가 있다. Twin Builder의 기본 라이브러리는 추출이 되지 않아서 Digital Twin 시스템을 구성할 때, Modelica 언어만 사용해야 했다. 하지만 2025 R1부터는 VHDL-AMS의 모든 라이브러리의 CS-FMU 추출이 가능하여 타사 소프트웨어 혹은 다른 워크플로우에 통합 사용이 가능하다.
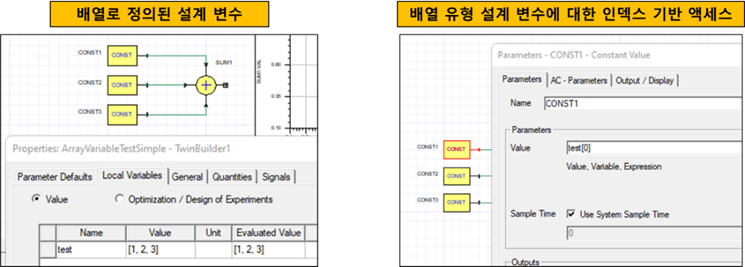
[그림 6] 설계 변수에 배열 유형으로 값을 입력하여 constant 컴포넌트에 적용한 사례
또다른 변화로는 변수 선언 시, array 타입을 허용한다는 점이다. Twin Builder에서는 변수의 값을 입력할 때 숫자 혹은 변수를 선언하여 사용할 수 있고 선언된 변수는 단순히 단일 숫자에 대해서만 허용되었다. 그러나 2025 R1부터 변수 유형으로 array 타입을 이용하여 표현할 수 있게 되었다. 이때 array에는 숫자만 가능하다.
Twin Builder에서 사용하는 Modelica 언어의 경우 구 버전을 제공해왔으나 2025 R1부터는 기본 설정으로 최신 버전인 MSL 4.0.0을 제공한다. 따라서 필요한 경우 모델이 호환될 수 있도록 조정이 필요하다.
■ Ansys TwinAI 소개 및 개선 사항
Ansys Digital Twin 제품군 중 TwinAI의 역할은 deployment 및 Hybrid Analytics라고 할 수 있다. 물론 TwinAI를 통해서도 ROM Builder를 이용하지 않는 ROM이라면 생성이 가능하고 Twin model, 시스템 컴포넌트 및 타사 단순화 모델(FMU)과 시스템을 구성하는 것 역시 가능하지만 TwinAI의 핵심 기능은 Twin model Deployment와 Hybrid Analytics다. 그 중 Hybrid analytics는 Twin model의 결과가 실제 자산의 결과에 더 잘 일치하도록 개선된 Digital Twin을 생성하는 기술로 Twin Calibration과 Fusion model의 두가지 형태로 제공하고 있다.
Twin Calibration은 일부 training data가 주어진 경우 'twin parameter'에 대한 더 나은 값을 추정하는 데 사용된다. Training data는 일반적으로 센서 데이터이고 교정은 트윈의 결과 거동을 실제 물리적 자산의 결과와 맞추는 데 사용된다. 물리 모델은 지나치게 이상적인 결과를 제공하여 실제 결과와 다소 차이가 있는 경우가 있다. 이 경우 Twin Calibration을 적용하면 물리 모델의 결과가 실제와 더 잘 일치하도록 모델 파라미터의 값을 조정할 수 있다. 혹은 노후화로 인해 자산의 성능이 변경된 경우 보정 기능을 적용하여 모델이 노후화된 자산의 결과도 예측할 수 있다. Fusion model은 물리 모델과 센서 Data 혹은 1D 해석 결과와 3D 해석 결과와 같이 고정밀의 결과와 저정밀의 결과를 융합하여 적은 양의 고정밀 데이터로도 정확도가 높은 Twin model을 생성하는 기법으로 생성 시 반드시 시간 이력을 필요로 한다. 모델은 고정밀 데이터와 저정밀 데이터 간의 잔차(residual)을 학습하여 저정밀의 데이터를 이용하더라도 모델의 정확도를 높일 수 있도록 한다.
이처럼 Hybrid Analytics가 적용된 Digital Twin model은 타사 디지털 트윈 제품들을 통해 생성한 Digital Twin model의 결과보다 더욱 실제 자산과 일치하는 결과를 보일 뿐 아니라 자산의 노후화에 대한 대비가 가능하여 장기적인 관점에서 디지털 트윈을 운용할 수 있게 한다.

[그림 7] 우측의 Calibration Plot 창은 모델 training 이후 live training 옵션 하부에 나타남
Twin Calibration을 적용할 경우, 생성된 Hybrid twin model의 결과가 원하는 결과에 도달했는지 확인하기 위해서는 Twin Calibration 설정화면을 벗어나서 post processing(plot) 작업을 해야 했고, 때문에 재보정이 필요한 경우 다소 번거로웠다. 하지만 2025 R1부터는 Twin Calibration setting 창에서 결과를 확인하기 위한 간단한 plot 확인 옵션이 추가되어 결과가 원하는 수준에 도달하지 못한 경우 계수 변경 등 설정 변경을 빠르게 진행할 수 있게 되었다. 다만, 현재까지는 제공하는 plot type은 line plot 하나만 제공하고 있다.
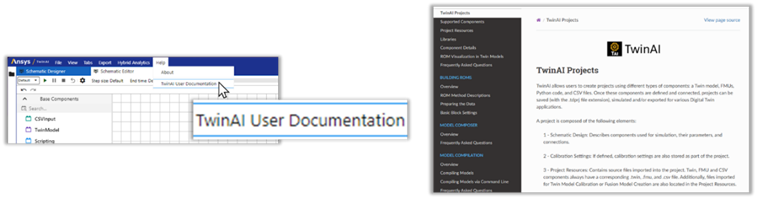
[그림 8] TwinAI User Documentation 위치
또한, TwinAI는 설치 시, 설치 경로 상에 user guide 폴더에 관련 문건을 넣어두었는데, 2025 R1부터는 TwinAI 상단의 Help 탭 내의 ‘TwinAI User Documentation’ 옵션을 통해 접근할 수 있다. 2025 R1 user guide에는 Hybrid Analytics에 관한 상세 설명 및 예제와 모델 추출 타입에 대한 설명 등을 확인할 수 있다.
■ Ansys Digital Twin 개선 사항
Ansys Digital Twin 제품군은 다른 통합 패키지와 다르게 설치를 위해서는 두 프로그램을 개별적으로 설치해야 했다. Ansys Twin Builder는 Ansys Electronics 제품군 풀 패키지 설치 파일을 통해서 설치가 가능했고 Ansys TwinAI의 경우 프로그램 실행 파일을 별도로 다운받아야 했다. 하지만 2025 R1부터는 Ansys 통합 설치 프로그램인 Ansys Installer에서 Ansys Digital Twin 제품 라인으로 두 프로그램을 동시에 설치할 수 있도록 변경되었다.
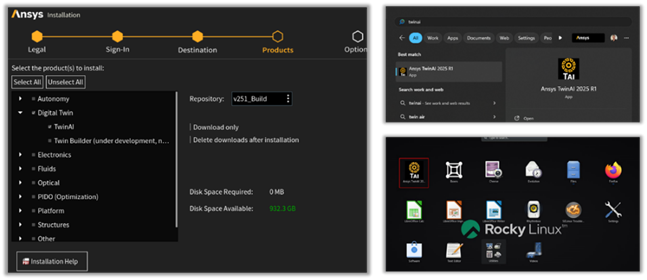
[그림 9] Ansys Installer 내의 Ansys Digital Twin 제품군
Ansys Twin Builder는 오직 Window OS에서만 설치가 가능하여 Linux 환경의 경우 AEDT 풀 패키지 설치를 해도 Twin Builder는 다운 받을 수 없다는 점은 주의가 필요하다.
Ansys Digital Twin의 핵심 기능 중 하나인 ROMs을 손쉽게 생성하고 이용할 수 있도록 Ansys Twin Builder와 TwinAI 모두 python 스크립팅 기능을 제공하고 있다. Python 스크립팅은 PyTwin, PyAEDT 등을 이용하여 더 풍부한 작업이 가능하다. 이를 위한 예제 파일을 TwinAI 내부 폴더에 함께 탑재했다.
[그림 10] PyAEDT 및 PyTwin 예제 위치
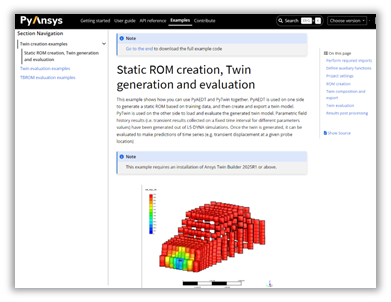
또한, 전체 워크플로우를 PyAEDT를 이용하여 training data를 기반으로 LTI ROM을 생성하는 방법을 보여주는 예제가 PyAnsys 사이트에 업로드 되었다. 생성된 ROM은 다시 Twin Builder로 불러와 DataPairs 컴포넌트로 input 데이터를 입력하고 결과 확인 및 출력 그래프를 그리는 것까지 해 볼 수 있다.
Static ROM 생성 시, PyAEDT 및 PyTwin 모두를 사용하여 생성하는 방법 또한 PyAnsys 사이트에서 예제를 통해 확인할 수 있다.
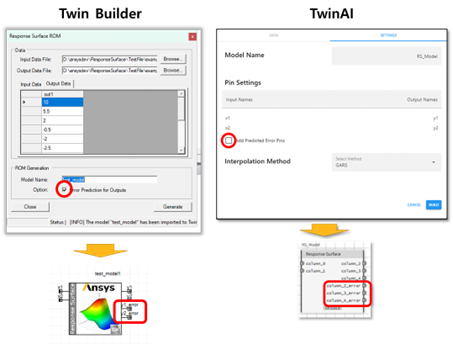
[그림 11] Response Surface ROM 변경 사항
Ansys Digital Twin에서 제공하는 다양한 ROM 중 Response Surface ROM이 2025 R1부터는 output에 대한 error prediction을 활성화하여 error를 정량화 할 수 있게 되었다. 또한, RS ROM 생성 시 optimal 또는 best response surface라는 두가지 옵션을 제공해왔지만 이제는 GARS(genetic aggregation response surface) 방법만 제공한다. 옵션에 따라서 내보내는 플랫폼을 선택할 수 있었지만 옵션이 제거되었기 때문에 컴파일 된 모든 모델은 크로스 플랫폼으로 추출된다.
맺음말
이번 호에서는 Ansys Twin Builder와 TwinAI로 구성된 Ansys Digital Twin에 대한 간략한 소개와 2025 R1의 각 프로그램 개선사항에 대해서 소개했다. Ansys Digital Twin은 Ansys의 물리 시뮬레이션 프로그램과 연결성이 우수하여 ROM 생성이 쉽고 Twin Builder 내에서 ROM과 다양한 시스템 컴포넌트들로 시스템 구성을 손쉽게 할 수 있기 때문에 Twin model 생성이 간편하다. TwinAI를 이용하면 생성된 모델이 지나치게 깨끗하거나 시스템이 오염, 부식 등의 노후화에 의해 Twin model 결과와 실제가 다른 경우 Hybrid Analytics를 이용하여 정확도를 강화할 수 있다는 장점을 가지고 있다. 2025 R1에서 Ansys는 이러한 Twin Builder와 TwinAI에 사용자 편의를 위한 옵션을 추가하고 여러 환경에서 사용할 수 있도록 내보내기 타입 확장 및 python 연동 예제 업로드 등 다양한 개선을 이루었다.
![[Ansys 2025 R1 Upgrade Webinar] Ansys Digital Twin](/storage/upload/data/thumbnail/1739860970_FK1tVbHKmGxpv9ynDw1sS31f0ddJJkGrV1PmK0WO.jpg)



 ㈜태성에스엔이
㈜태성에스엔이-
- 대표이사 : 심진욱, 박인규
- 사업자등록번호 : 219-81-23192
- 통신판매업 신고번호 : 제2017-서울성동-1100호
ⓒ TAE SUNG S&E Inc.



