
ANZINE : CAE 기술 매거진
이전 ANZINE Home Tech-Insight



리니어 모터 성능 해석을 위한 전자기장 해석
- 김창환 매니저
- 태성에스엔이
- chkim@tsne.co.kr
리니어 모터 성능 해석을 위한 전자기장 해석
리니어 모터는 전자기 유도 원리를 이용한 전기 모터 중 하나이다. 회전 모터와 달리 직선으로 구동되는 장치로서 병진 운동(Translation Motion)으로 고속 운송 시스템, 산업 자동화 및 로봇, 의료 기기 등 다양한 산업 영역에서 활용되고 있다. 특히 고속으로 표면 실장 기술(Surface Mount Technology, SMT)에 칩 마운터(Chip Mounter) 장비에 많이 사용되며, 반도체 검사 장비, 디스플레이 제조 장비에 주요 부품으로 함께 사용된다. 이번 호에서는 리니어 동기식 모터(Linear Synchronous Motor) 중심으로 구동 원리와 코어 타입 및 코어리스 리니어 모터에 추력(Thrust Force) 성능 및 역기전력 특성을 확인하는 전자기장 해석 방법을 소개하고자 한다.
Introduction
리니어 모터는 전통적인 회전 모터와 달리, 직선 운동하는 전기 기계로서 많은 장점을 갖고 있다. 회전 운동을 직선으로 변환시키는 추가적인 기계 부품, 즉 리드 스크류(Lead Screw), 랙&피니어(Rack and Pinion), 웜기어(Worm Gear) 등이 필요 없기 때문에 더 간단하고 효율적으로 설계가 가능하다. 또한 낮은 마모와 유지 보수(회전 부품이 적기 때문) 때문에 고속 운동 시스템, 정밀 위치 제어가 필요한 산업용 기계, 반도체 제조 장비 등 다양한 분야에 사용된다. 물론 장점만 있는 것은 아니다. 회전 베어링 대신 LM 가이드(Linear Motion Guide) 부품을 사용해야 정밀하게 이송된다. 이러한 리니어 모터 주요 성능을 확인하기 위해서는 전자기 원리를 바탕으로 자기 등가 회로(Magnetic Equivalent Circuit)을 구현하거나 유한 요소 방법(Finite Element Method)을 선택해야 한다. 본 자료에서는 전자기장 해석 소프트웨어인 Ansys Maxwell를 활용한 리니어 모터 추력과 역기전력 해석 방법을 전달하고자 한다.
코어 타입 리니어 모터 해석 모델
코일에 인가된 교류로 발생된 자기장과 영구 자석 간에 상호 작용으로 로렌츠 힘이 발생되며, 이는 시간에 따른 자속 변화로 힘의 크기가 변화한다. 이는 코일에 역기전력을 발생시키며, 역기전력의 크기에 따라 이동자에 인가되는 전압의 크기 및 정격 출력을 산정할 때 필요로 하다. 때문에 Ansys Maxwell 상에 리니어 모터에 추력 성능을 해석하기 위해서는 과도 해석(Transient) 해석 솔버(Solver)를 사용해야 한다.
[그림1]은 코어 타입 리니어 모터를 나타낸다. 크게 이동자와 고정자로 나뉜다. 이동자는 3상 코일과 적층 코어로 구성되며, 전기 절연 및 부식 방지 등을 위해 에폭시로 함침 된다. 이는 코일에 전류를 인가해 적층 코어에 자기장을 생성시키며, 하단에 배치된 고정자 영구자석 극성에 맞도록 각 상에 전류를 인가해 로렌츠 힘으로 직선 운동을 하는 부품이다. 고정자는 영구자석과 요크로 구성되며, 경우에 따라 영구자석을 보호하기 위한 커버가 추가되어 제작되기도 한다. 고정자는 말 그대로 이동자가 이동하는 경로와 평행한 바닥에 배치되어 이동되지 않는 부품을 뜻하며, 규칙적으로 배열된 자석으로 극성을 갖고 있다.
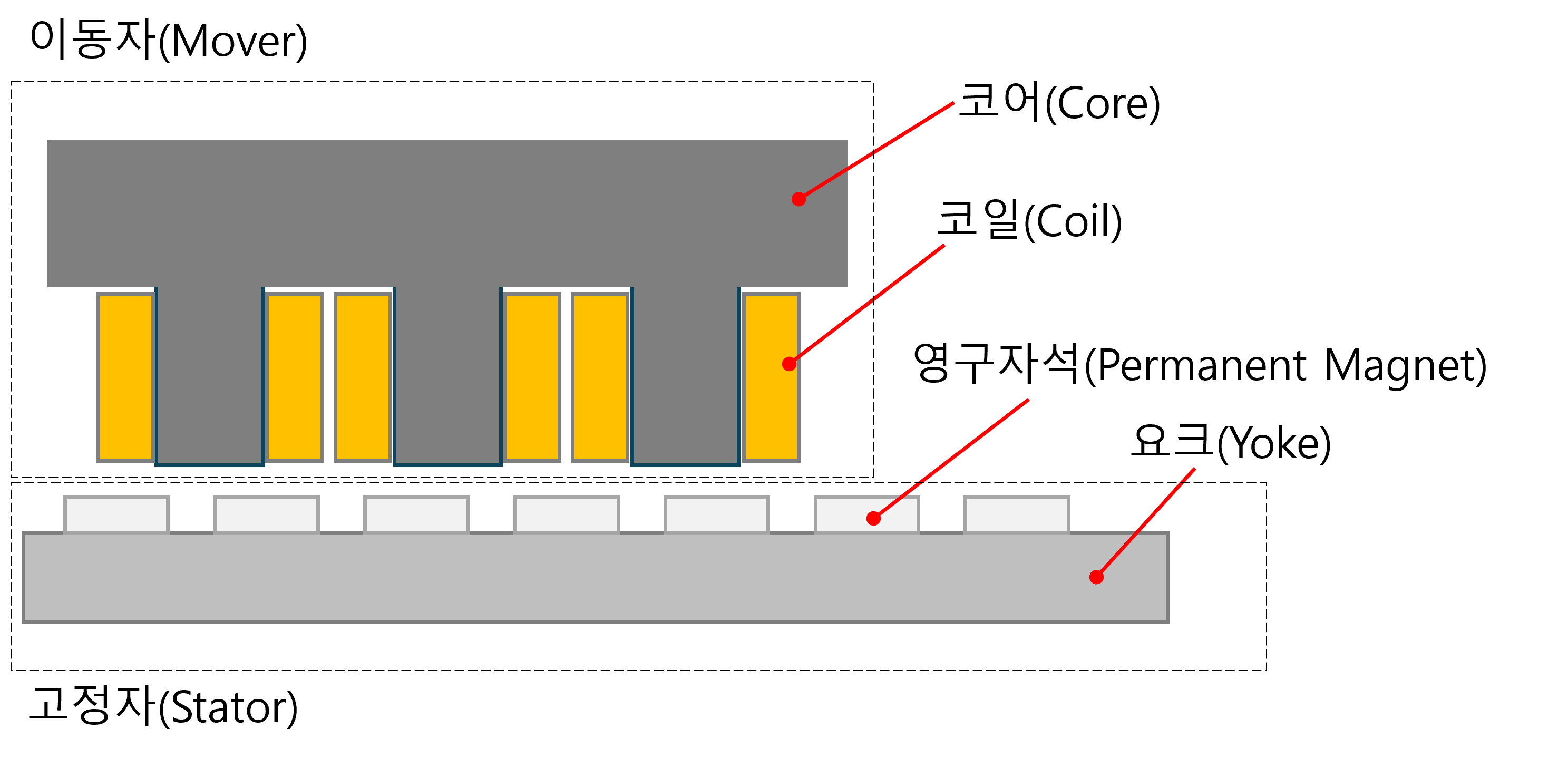
[그림 1] 코어 타입 리니어 모터 구조
앞서 설명한 이동자에 대한 해석 모델을 제작하기 위해서, 코어와 요크는 기본 물성인 ‘steel 1010’, 영구자석은 ‘NdFeB35’, 코일은 ‘Copper’로 정의하였다. 코어 재질에 사용된 ‘Steel 1010’ 재질은 Ansys Maxwell 상에서 비투자율을 B-H 데이터를 사용했으며, 주변 자장 세기에 따른 자속 밀도의 변화를 비선형 특성으로 반영시켜 해석하였다. 영구 자석 또한 상온 섭씨 20도 기준의 B-H특성을 사용하였다.
[그림2]는 이동자에 배치된 3상 코일의 단면을 나타내는 그림이다. Ansys Maxwell 2D에서 코일에 인가되는 전류를 정의하기 위해서는 각 단면에 전류 방향과 크기를 정의해 주어야 한다. 1개의 권선 코일의 단면을 자르면 2개의 면이 생성이 되고, 각 단면에 전류 인가 방향을 확인해서 Excitation 셋업을 정의할 필요가 있다.
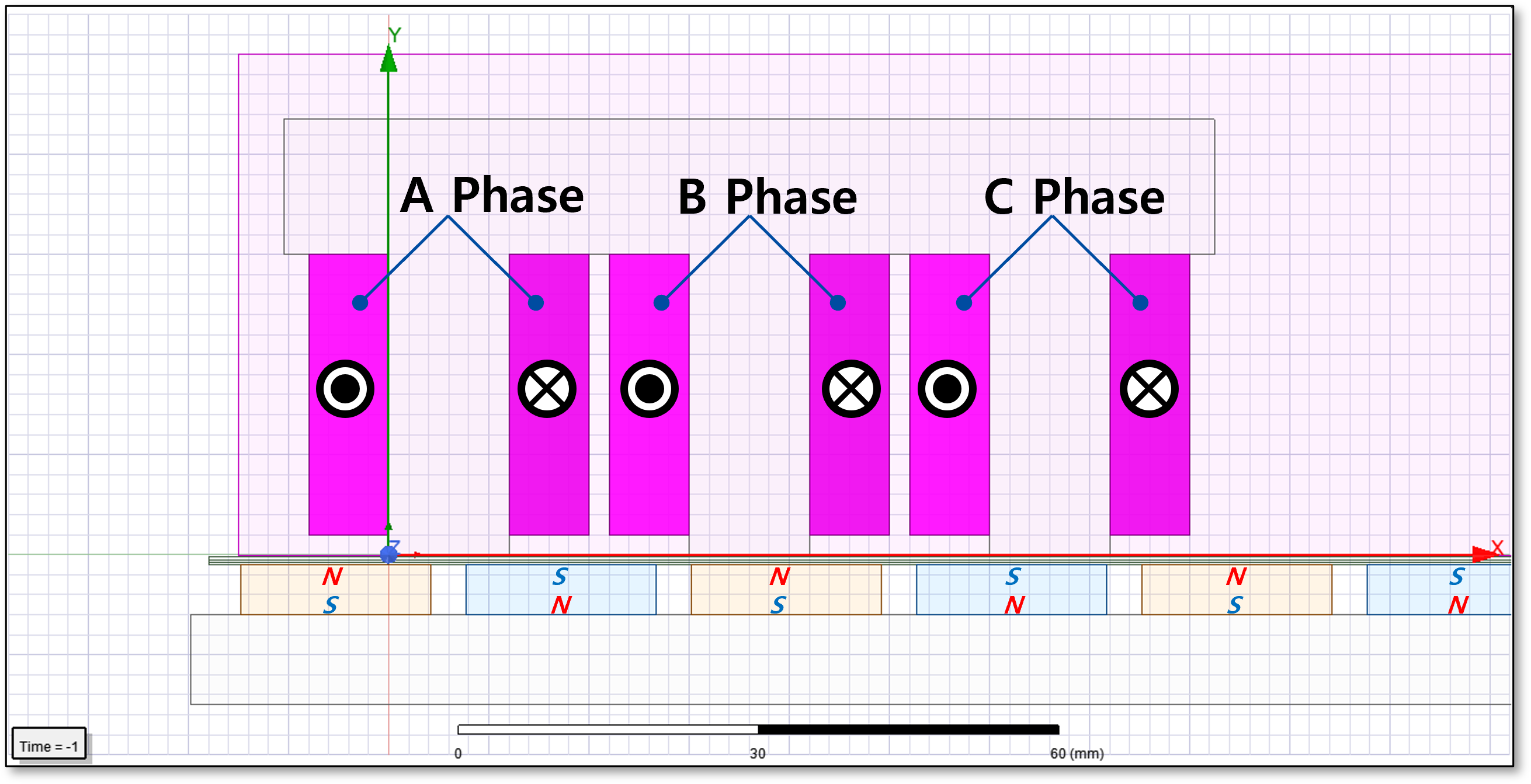
[그림 2] 상 별 전류 인가 단면
다음은 Excitation 조건이 부여된 각 코일 소스를 상별로 묶는 ‘Winding’ 조건을 설정해야 한다. [그림3]은 A, B, C 상 별 단면을 ‘Winding’으로 정의하고, 입력 소스원을 ‘Current’로 정의한 그림이다. 아래 수식과 같이 120도 위상 차이를 두고 코사인 파형의 전류를 입력하였다. 여기서 주의해야 할 점이 입력 파형의 주기를 설정하는 것인데, 리니어 모터의 전기각은 영구 자석이 배치된 간격 ‘Pole Pitch’에 의해 결정된다는 것이다. 때문에 코사인 파형 주기 성분에 ‘Pole Pitch’ 사용자 정의 변수를 입력하여 해석에 사용하였다.
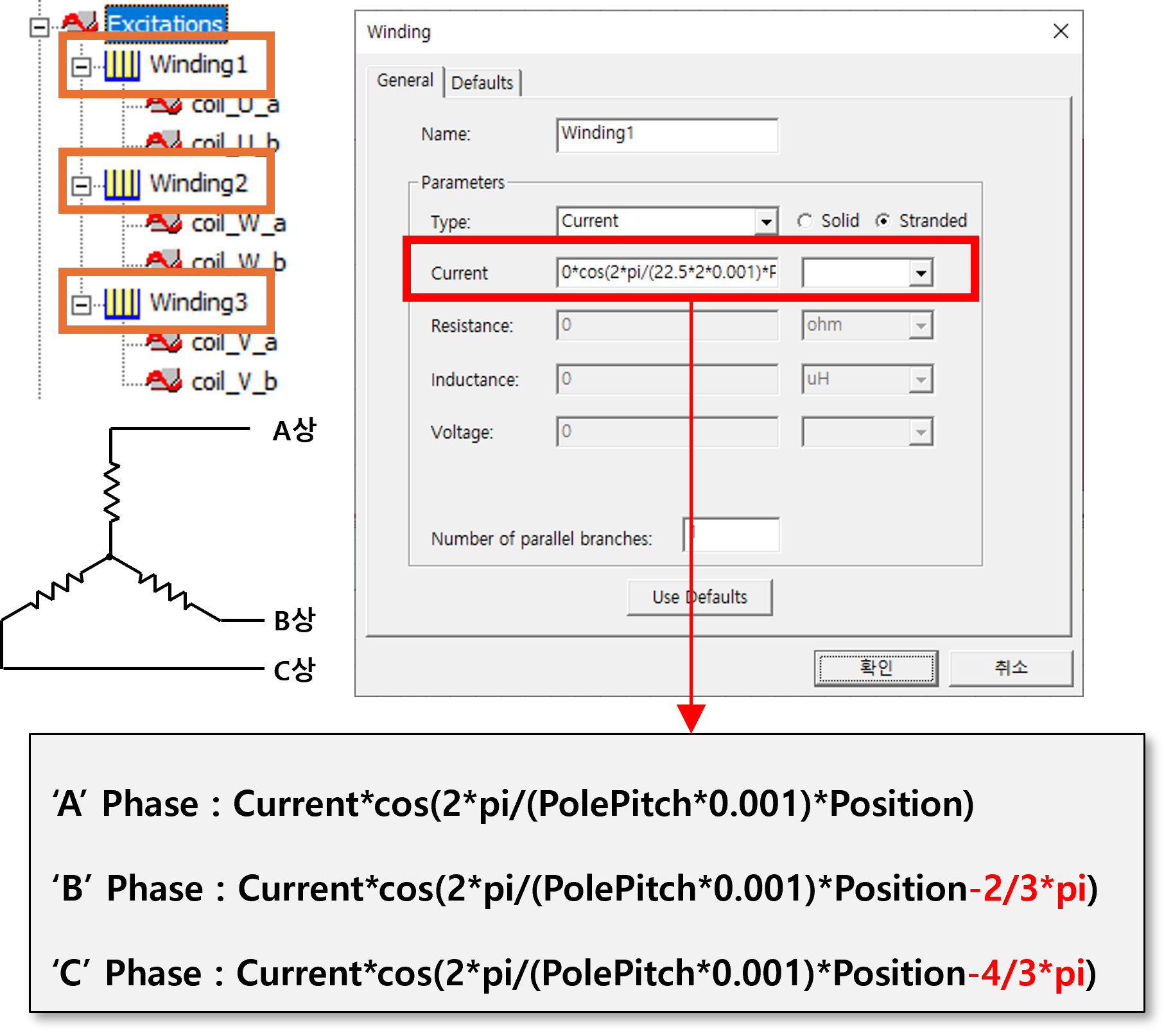
[그림 3] 코일 권선 정의 및 전류 소스 파형 수식
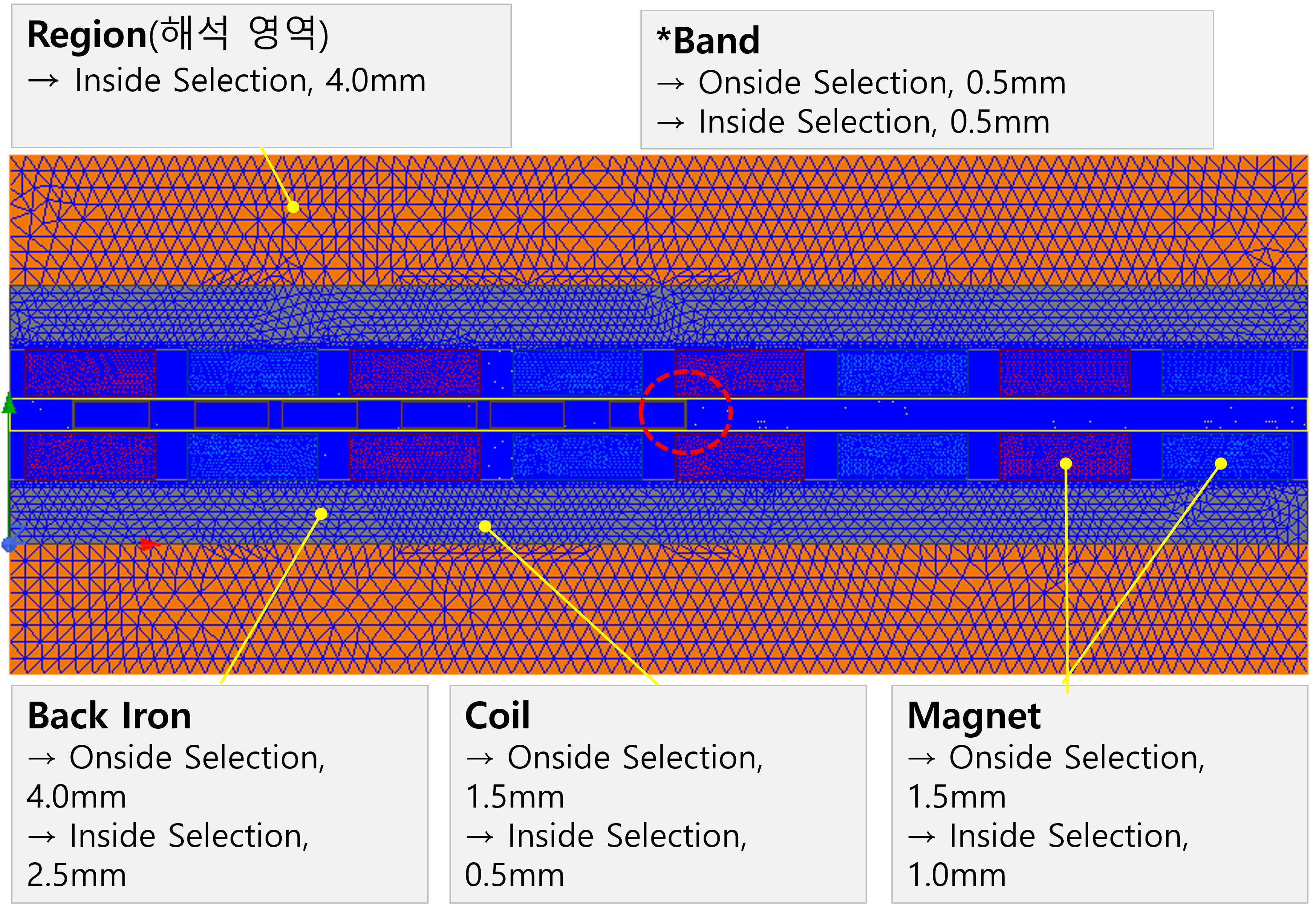
Ansys Maxwell에서는 자동으로 메쉬 품질을 개선시켜 주는 ‘Adaptive Mesh’ 기능이 있다. 하지만 전자기장 과도 해석 솔버에서는 해당 기능이 없기 때문에 사용자가 직접 메쉬를 설정해 줘야 한다. 전자기장 해석에서 매뉴얼로 메쉬 설정하는데 장단점이 있지만, 리니어 모터 또는 회전기 모터, 액추에이터와 같은 공극에서 발생되는 자기력을 해석하는 어플리케이션인 경우 자속 경로와 공극 영역을 고려해서 ‘On Selection’과 ‘Inside Selection’ 메쉬를 반영시켜야 한다.
그림[4]는 과도 해석에서 직선 운동하는 영역을 ‘Band’로 지정한 그림이다. 이동자가 이동할 경로 전체를 포함한 이 형상은 Ansys Maxwell 상에서 ‘Motion Setup’ 사용시 해당 부분에 이동할 파트의 이동 속도를 지정하는 영역이 된다. ‘Band’ 영역을 지정할 때, 공극 메쉬 품질을 확보하기 위해 추가한 ‘Mesh Dummy’가 맞닿지 않도록 주의해야 한다.
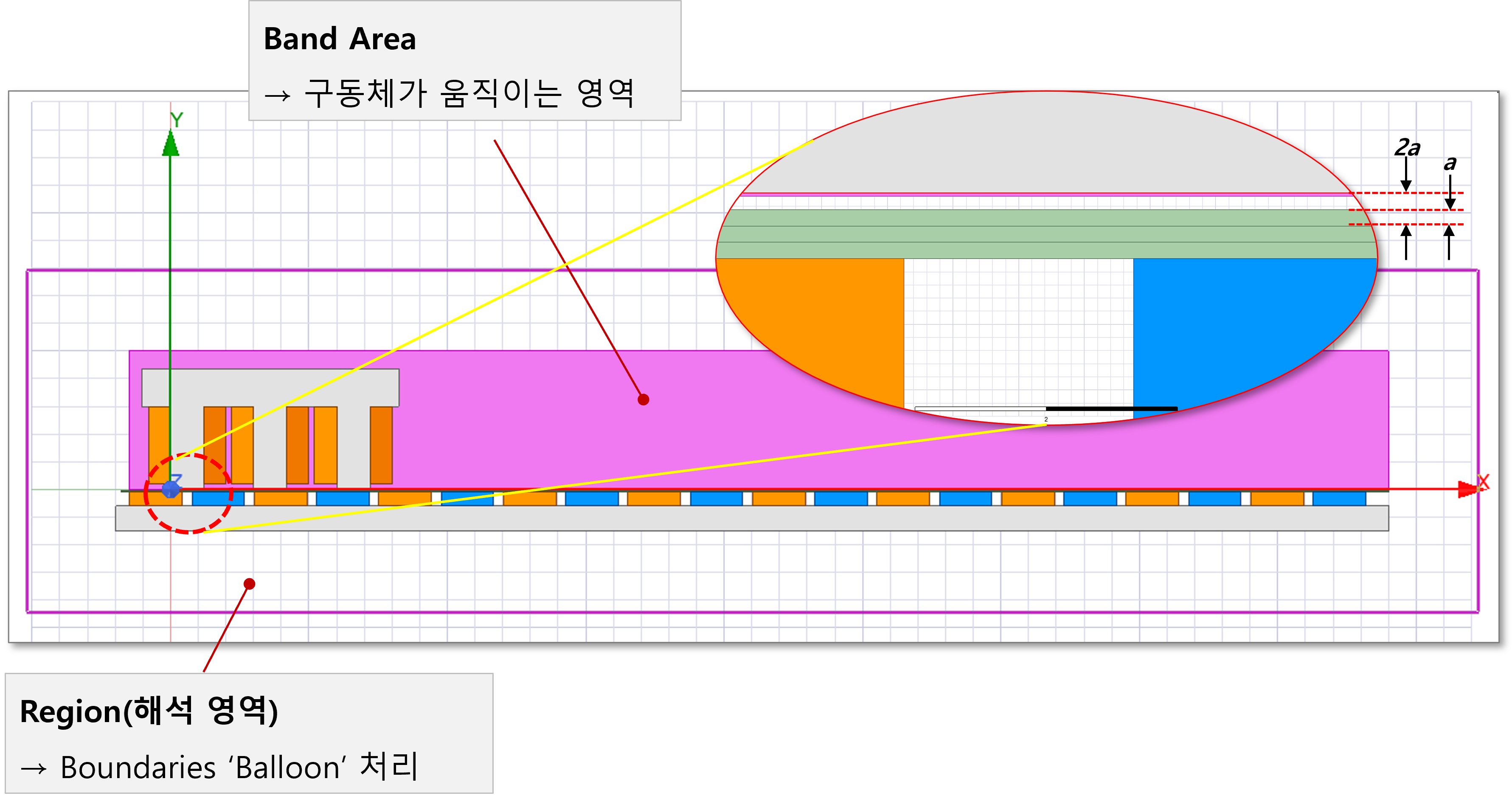
[그림 4] 이동 영역을 지정해 주는 ‘Band’ 형상
그림[5]는 앞서 정의된 ‘Band’, ‘Mesh Dummy’를 포함한 리니어 모터 형상의 메쉬 형상이다. 공극을 총 4개의 층으로 나눠 정의했다. 그리고 이동하는 파트에 ‘On Selection’과 ‘Inside Selection’ 형상 조건을 정의했다.
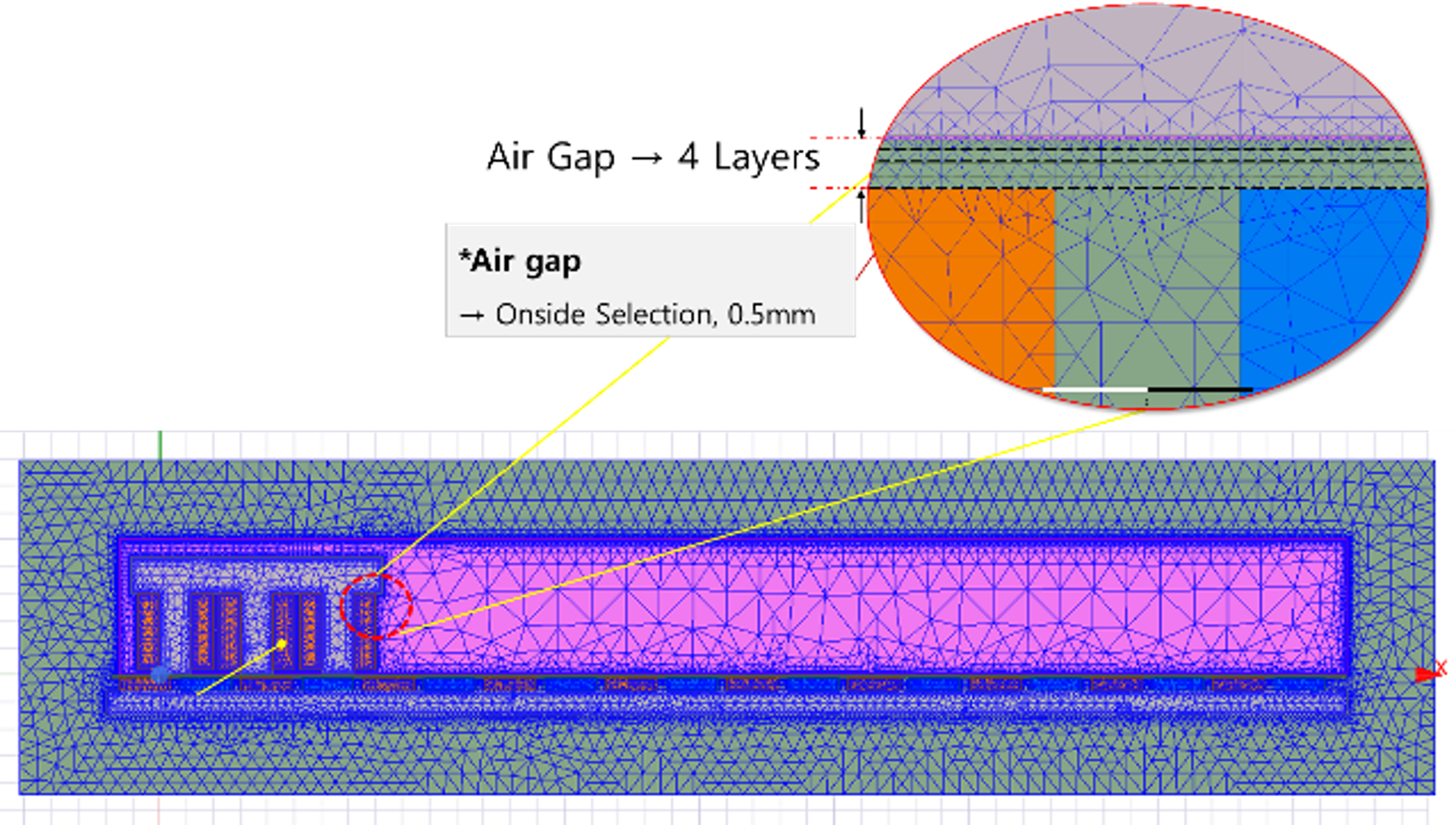
[그림 5] 메쉬 형상
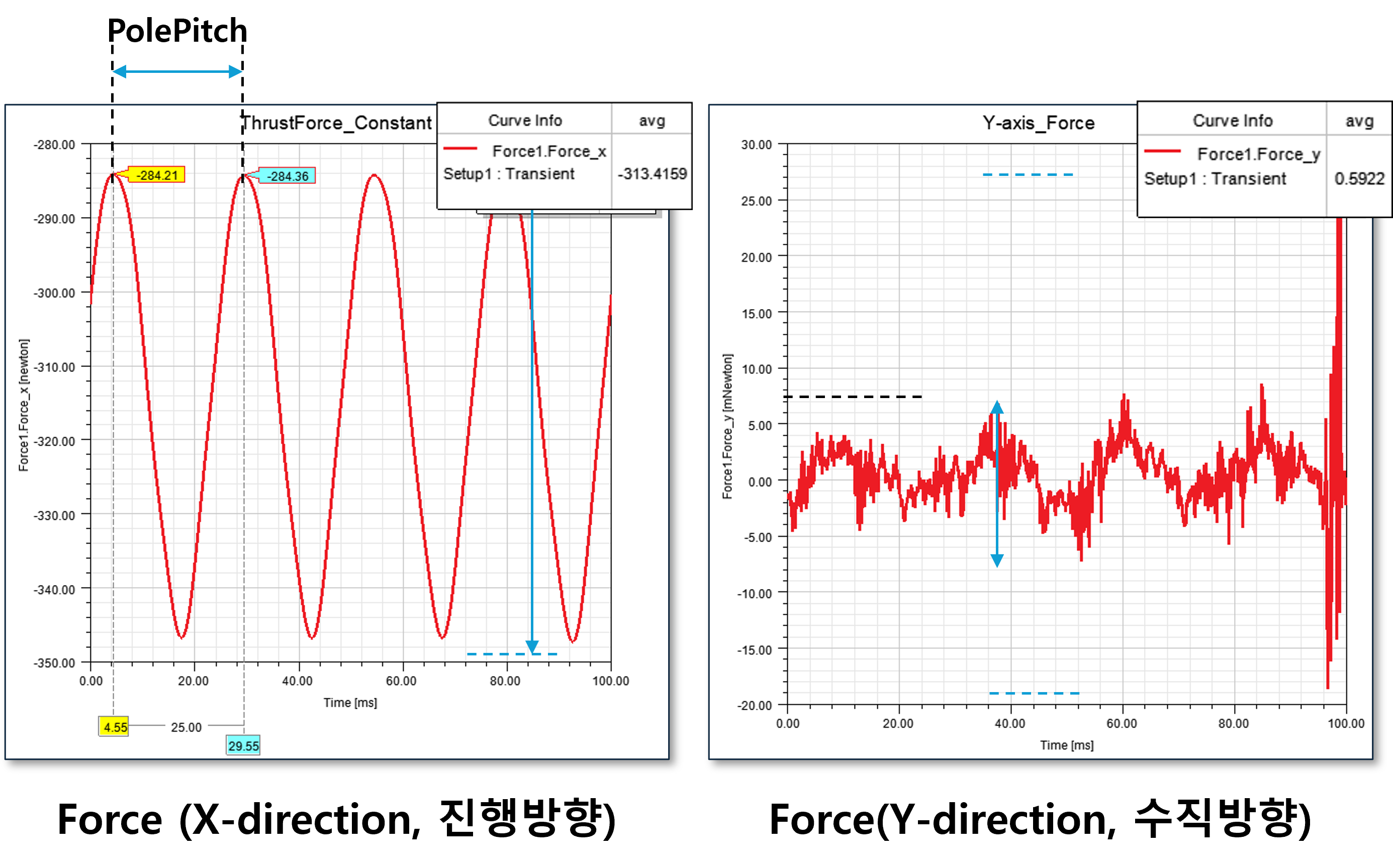
‘형상 모델링’ → ‘재질 정의’ → ‘입력 소스원 정의’ → ‘모션 정의’ → ‘메쉬 셋업’을 마치고 나면, 큰 틀에서 리니어 모터의 추력 성능을 확인할 수 있는 해석 모델이 완성된다. 여기서 입력 전류의 크기는 1[Arms]로 정의할 경우, 추력 상수(Thrust Force Constant)를 산출할 수 있고, 이동자의 이송 속도를 1[m/s], 2[m/s] 등으로 정의할 경우 역기전력 성능을 해석할 수 있다.
그에 반해 [그림6]은 코일에 전류를 인가시키지 않고, 이동자를 등속도로 이송시켰을 때 이동자에서 발생된 힘을 X, Y축 별로 나타낸 것이다. 이동 방향과 평행한 X축에서 발생한 힘, 이를 코깅(Cogging)이라 부른다. Y축 힘은 이동자와 고정자 간에 발생한 흡입력(Attraction Force)이다.

[그림 6] 코깅과 흡입력 해석 결과
[그림7]은 이동자를 등속도로 1m/s 이동시켰을 때, 상 별 역기전력 파형을 나타낸 그림이다. 역기전력은 이동자의 이동 속도 크기에 비례하며, 과도 해석 시 적절한 ‘Time Step’과 ‘End Time’ 그리고 이동 거리를 산정해야 한다. 이는 이동 속도 크기에 따라 단일 이동 거리가 달라 지기 때문에, 이동 속도와 ‘Time Step’ 간에 산술식으로 살펴 보고자 하는 역기전력의 주기 파형을 계산할 수 있다.
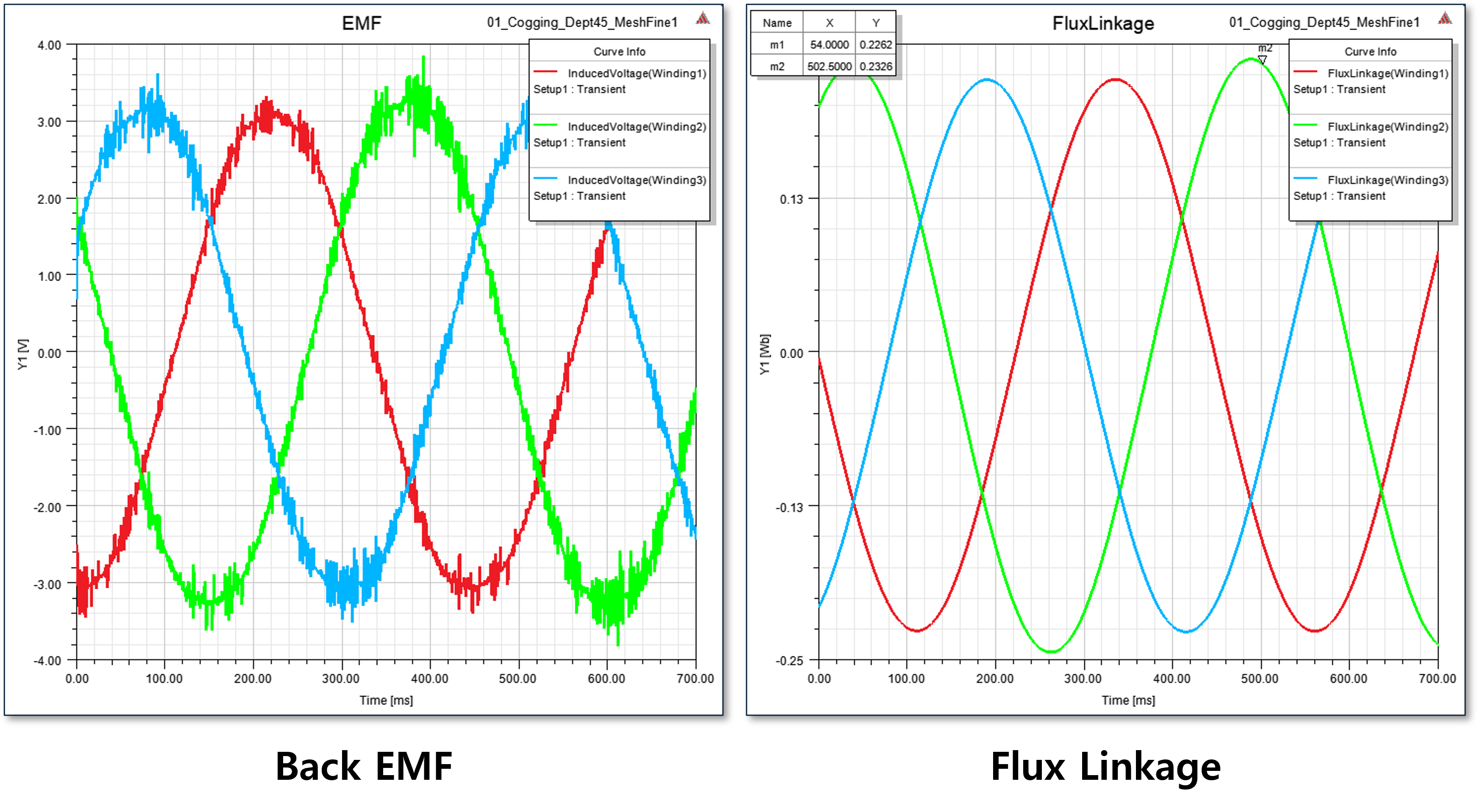
[그림 7] 역기전력 파형 및 Flux Linkage 파형
코어리스 타입 리니어 모터 해석 모델
코어리스 타입의 리니어 모터는 코어가 없고, 에폭시와 코일로 제작된 이동자를 사용한다. 코어리스 리니어 모터는 코깅이 매우 작으며, 고속 이송 기기에 주로 사용된다. [그림8]은 코어리스 리니어 모터 단순 구조를 나타내며, 상하로 대칭된 고정자(영구자석+요크)와 가운데 코일이 배치된 것을 확인할 수 있다.
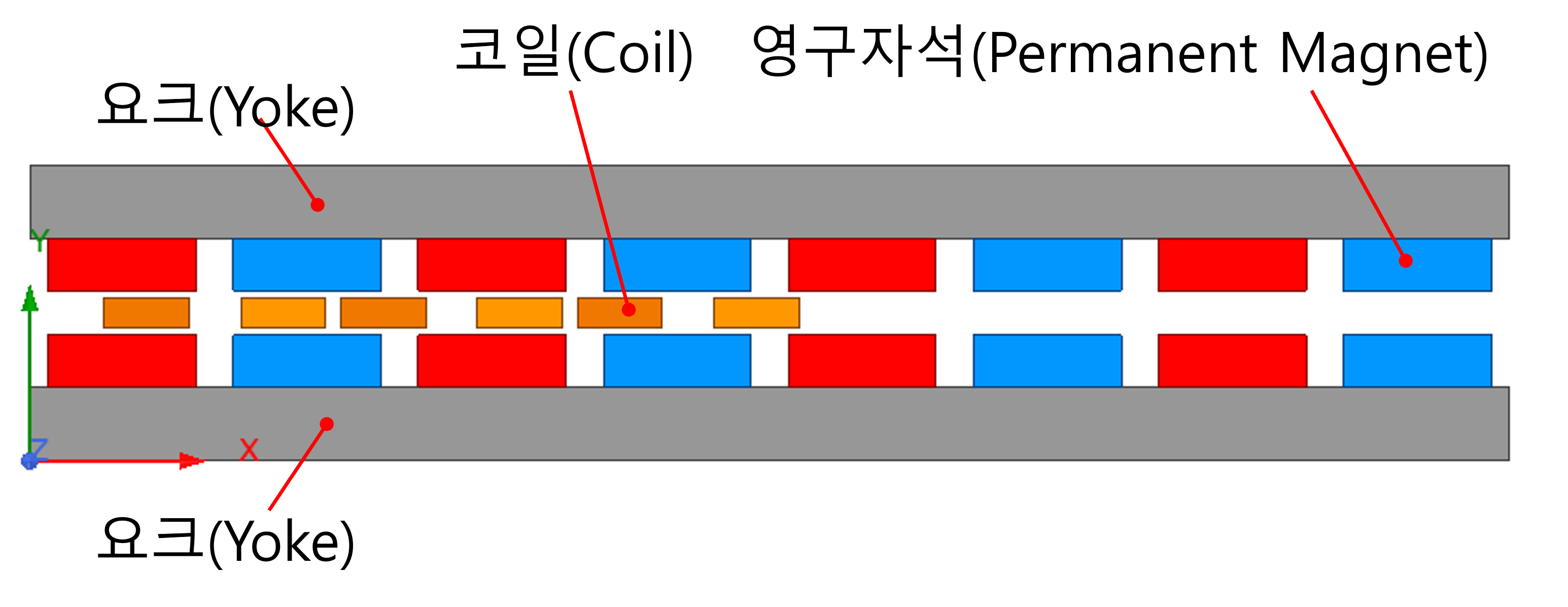
[그림 8] 코어리스 리니어 모터 단순 형상
[그림9]는 이동자에 배치된 3상 코일의 단면을 나타내는 그림이다. 앞서 보인 코어 타입 리니어 모터와 달리 코어가 없는 구조이지만, Maxwell 상에서 전류를 정의하는 방법은 동일하다. 좌측부터 우측으로 A, B, C 상으로 표현했다.
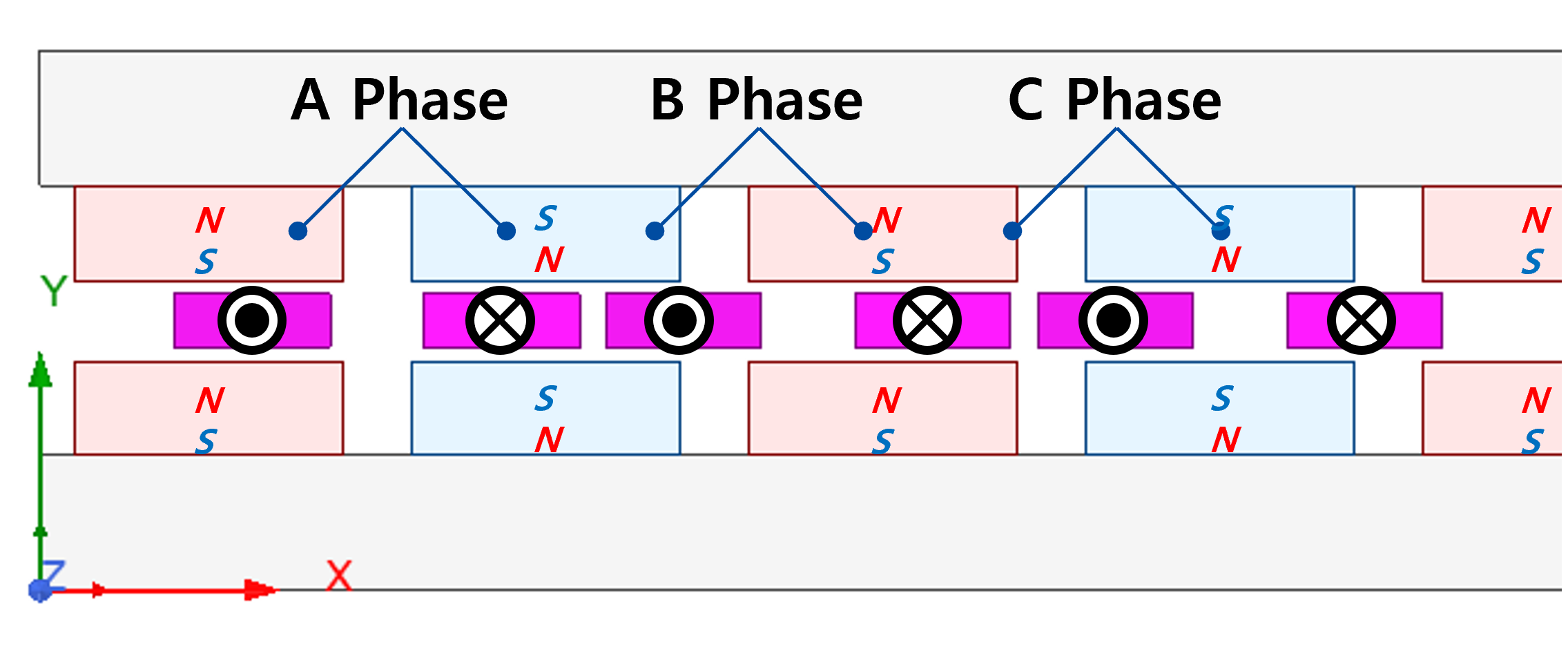
[그림 9] 상 별 전류 인가 단면
[그림10]은 코어리스 리니어 모터 권선에 정의된 ‘Winding’ 셋팅이다. 마찬가지로 각 상 별 120도 위상 차이를 두고 코사인 파형의 전류를 정의했다.

[그림 10] ] 코일 권선 정의 및 전류 소스 파형
[그림11]은 공극 영역의 메쉬를 정의한 그림이다. 위 아래 영역에 각 4층 구조의 ‘Mesh Dummy’를 추가해 격자를 생성했다. 이는 앞서 코어 타입 리니어 모터에서 설명한 바와 같이 공극에서 발생하는 로렌츠 힘을 정확하게 해석하기 위함이다.
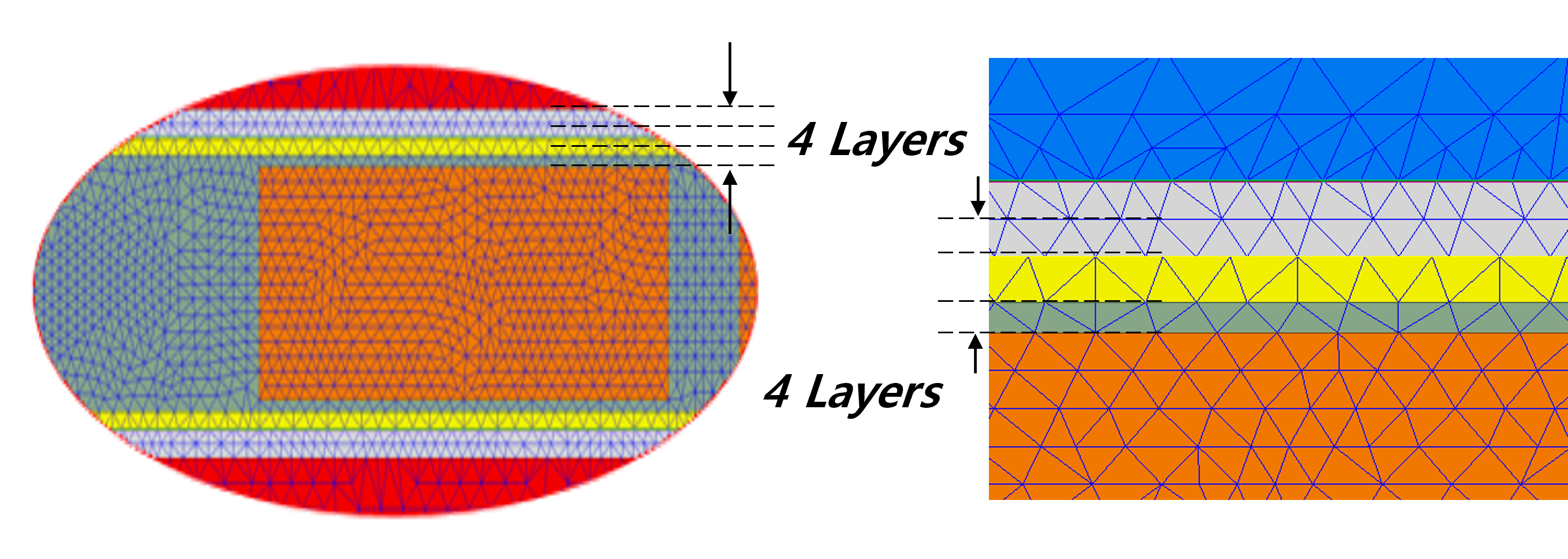
[그림 11] 공극 메쉬 영역
그림[12]는 앞서 정의된 ‘Band’, ‘Mesh Dummy’를 포함한 코어리스 리니어 모터 형상의 메쉬 형상이다. 앞서 코어 타입과 달리 내부에 ‘Inside Mesh’ 영역을 크게 주었으며, 이는 코일에서 발생한 로렌츠 힘을 정확하게 해석하기 위함이다.
[그림 12] 메쉬 형상
그에 반해 [그림13]은 이동자의 XY축 별 자기력 해석 결과이다. 코깅은 X축의 그래프, 흡입력에 해당되는 결과는 Y축이다. Y축 결과를 살펴보게 되면, 매우 작은 값의 흡입력이 발생하는 것을 확인할 수 있다.
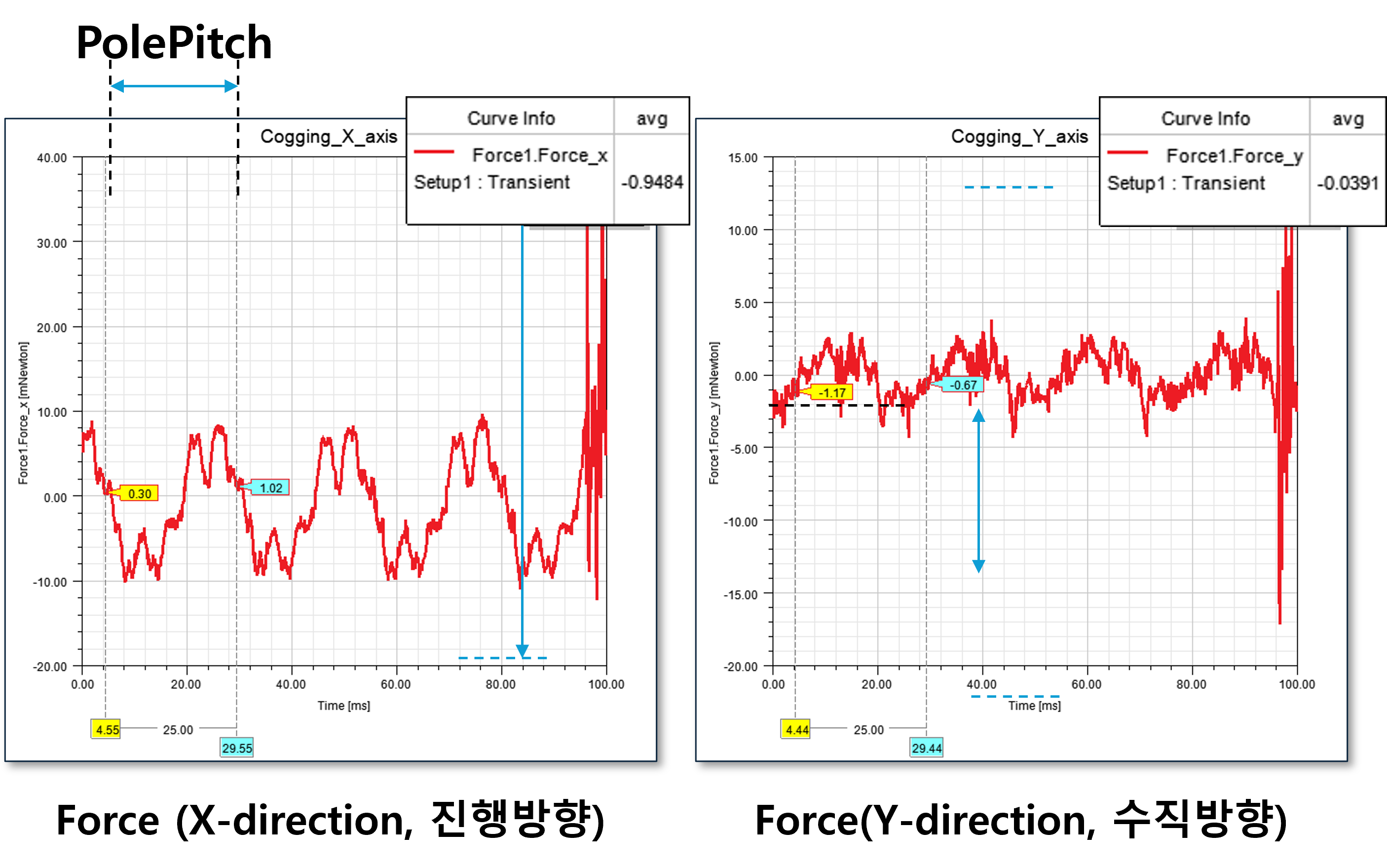
[그림 13] 코깅과 흡입력 해석 결과
[그림14]는 이동자를 등속도로 1m/s 이동시켰을 때, 상 별 역기전력 파형을 나타낸 그림이다. 역기전력은 이동자의 이동 속도 크기에 비례하며, 과도 해석 시 적절한 ‘Time Step’과 ‘End Time’ 그리고 이동 거리를 산정해야 한다. 이는 이동 속도 크기에 따라 단일 이동 거리가 달라 지기 때문에, 이동 속도와 ‘Time Step’ 간에 산술식으로 살펴 보고자 하는 역기전력의 주기 파형을 계산할 수 있다.
[그림 14] 역기전력 파형 및 Flux Linkage 파형
맺음말
본 호에서는 리니어 모터 성능 해석에 대해 소개했다. Ansys Maxwell 를 사용하여, 코어 타입과 코어 리스 타입 2가지 리니어 모터에 대한 추력과 역기전력, 코깅 해석을 수행했다. 3D로 해석이 충분히 가능하지만, 빠르게 추력 상수와 역기전력 특성을 확인하기 위해서는 2D 해석으로 접근할 것을 권장한다.



 ㈜태성에스엔이
㈜태성에스엔이-
- 대표이사 : 심진욱, 박인규
- 사업자등록번호 : 219-81-23192
- 통신판매업 신고번호 : 제2017-서울성동-1100호
ⓒ TAE SUNG S&E Inc.



